Prerequisites: ch137 (Vector Spaces), ch125 (Vector Addition), ch126 (Scalar Multiplication), ch127 (Linear Combination)
You will learn:
What makes a subset of a vector space a subspace
The three closure conditions and why all three are necessary
How to verify or falsify subspace membership
The most important subspaces: column space, null space, row space
Why subspaces are the natural habitat of linear algebra
1. Concept¶
A subspace is a subset of a vector space that is itself a vector space under the same operations.
Not every subset qualifies. The subset must be closed under the operations that define the space — addition and scalar multiplication. If you take two vectors from the subset and add them, you must stay inside the subset. If you scale a vector from the subset, you must stay inside.
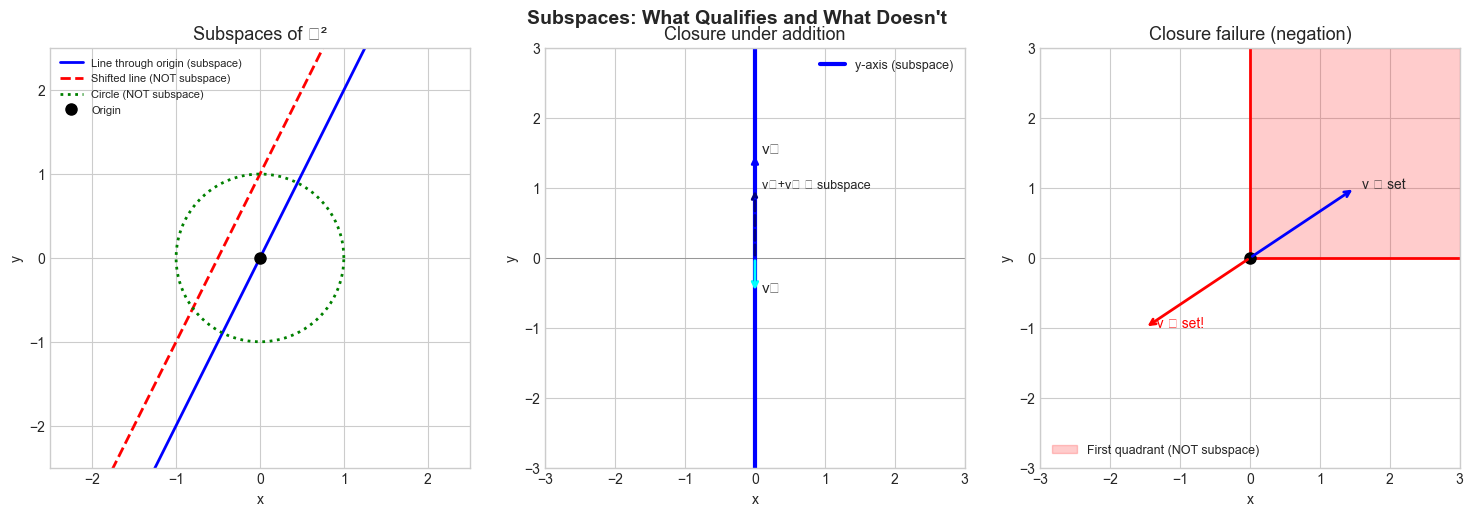
The intuition: a subspace is a flat structure passing through the origin. Lines through the origin, planes through the origin, the origin itself — these are subspaces of ℝⁿ. A circle, a line not through the origin, a sphere — none of these are subspaces.
Common misconception: Every subset containing the origin is a subspace. False. A circle centered at the origin contains the origin but is not closed under addition.
2. Intuition & Mental Models¶
Geometric analogy: Think of a subspace as a flat shadow. In 3D space, a plane through the origin is a 2D subspace. A line through the origin is a 1D subspace. The origin alone is a 0D subspace. The full 3D space is a 3D subspace. Every subspace of ℝ³ is one of these four types.
Computational analogy: Think of a subspace as the set of all outputs of a linear function from some smaller space. If you have a matrix A with 2 columns in ℝ³, then all vectors of the form Ax (for any x ∈ ℝ²) form a subspace of ℝ³ — specifically a plane (or line, or point) through the origin.
Closure mental model: A subspace is sealed under linear operations. Any linear combination of vectors inside the subspace stays inside. This is why the origin must always be included — scaling any vector by zero gives the zero vector.
Recall from ch137 that a vector space requires 8 axioms. A subspace inherits all of them from the parent space — you only need to verify 3 conditions.
3. Visualization¶
# --- Visualization: Subspaces of R^2 and R^3 ---
# Shows which geometric objects are subspaces (pass through origin, flat)
# and which are not (shifted, curved)
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
plt.style.use('seaborn-v0_8-whitegrid')
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
# --- Plot 1: R^2 subspaces ---
ax = axes[0]
t = np.linspace(-2, 2, 100)
# Subspace: line through origin (y = 2x)
ax.plot(t, 2*t, 'b-', linewidth=2, label='Line through origin (subspace)')
# Non-subspace: line NOT through origin (y = 2x + 1)
ax.plot(t, 2*t + 1, 'r--', linewidth=2, label='Shifted line (NOT subspace)')
# Non-subspace: circle
theta = np.linspace(0, 2*np.pi, 100)
ax.plot(np.cos(theta), np.sin(theta), 'g:', linewidth=2, label='Circle (NOT subspace)')
ax.plot(0, 0, 'ko', markersize=8, label='Origin')
ax.set_xlim(-2.5, 2.5); ax.set_ylim(-2.5, 2.5)
ax.set_aspect('equal')
ax.set_title('Subspaces of ℝ²', fontsize=13)
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.legend(fontsize=8)
# --- Plot 2: Closure test visualization ---
ax2 = axes[1]
ax2.set_xlim(-3, 3); ax2.set_ylim(-3, 3)
ax2.set_aspect('equal')
ax2.axhline(0, color='gray', linewidth=0.5)
ax2.axvline(0, color='gray', linewidth=0.5)
# Subspace: the y-axis (all vectors [0, y])
ax2.plot([0, 0], [-3, 3], 'b-', linewidth=3, label='y-axis (subspace)')
# Demonstrate closure: two vectors in y-axis
v1 = np.array([0, 1.5])
v2 = np.array([0, -0.5])
v_sum = v1 + v2
ax2.annotate('', xy=v1, xytext=[0,0], arrowprops=dict(arrowstyle='->', color='blue', lw=2))
ax2.annotate('', xy=v2, xytext=[0,0], arrowprops=dict(arrowstyle='->', color='cyan', lw=2))
ax2.annotate('', xy=v_sum, xytext=[0,0], arrowprops=dict(arrowstyle='->', color='navy', lw=2, linestyle='dashed'))
ax2.text(0.1, 1.5, 'v₁', fontsize=11); ax2.text(0.1, -0.5, 'v₂', fontsize=11)
ax2.text(0.1, v_sum[1], 'v₁+v₂ ∈ subspace', fontsize=9)
ax2.set_title('Closure under addition', fontsize=13)
ax2.set_xlabel('x'); ax2.set_ylabel('y')
ax2.legend(fontsize=9)
# --- Plot 3: Failure of closure ---
ax3 = axes[2]
ax3.set_xlim(-3, 3); ax3.set_ylim(-3, 3)
ax3.set_aspect('equal')
# Non-subspace: first quadrant (not closed under negation)
x_fill = np.array([0, 3, 3, 0])
y_fill = np.array([0, 0, 3, 3])
ax3.fill(x_fill, y_fill, alpha=0.2, color='red', label='First quadrant (NOT subspace)')
ax3.plot([0, 3], [0, 0], 'r-', lw=2)
ax3.plot([0, 0], [0, 3], 'r-', lw=2)
v = np.array([1.5, 1.0])
neg_v = -v
ax3.annotate('', xy=v, xytext=[0,0], arrowprops=dict(arrowstyle='->', color='blue', lw=2))
ax3.annotate('', xy=neg_v, xytext=[0,0], arrowprops=dict(arrowstyle='->', color='red', lw=2))
ax3.text(v[0]+0.1, v[1], 'v ∈ set', fontsize=10)
ax3.text(neg_v[0]+0.1, neg_v[1], '-v ∉ set!', fontsize=10, color='red')
ax3.plot(0, 0, 'ko', markersize=8)
ax3.set_title('Closure failure (negation)', fontsize=13)
ax3.set_xlabel('x'); ax3.set_ylabel('y')
ax3.legend(fontsize=9)
plt.suptitle('Subspaces: What Qualifies and What Doesn\'t', fontsize=14, fontweight='bold')
plt.tight_layout()
plt.show()C:\Users\user\AppData\Local\Temp\ipykernel_17240\268115826.py:80: UserWarning: Glyph 8477 (\N{DOUBLE-STRUCK CAPITAL R}) missing from font(s) Arial.
plt.tight_layout()
C:\Users\user\AppData\Local\Temp\ipykernel_17240\268115826.py:80: UserWarning: Glyph 8321 (\N{SUBSCRIPT ONE}) missing from font(s) Arial.
plt.tight_layout()
C:\Users\user\AppData\Local\Temp\ipykernel_17240\268115826.py:80: UserWarning: Glyph 8322 (\N{SUBSCRIPT TWO}) missing from font(s) Arial.
plt.tight_layout()
C:\Users\user\AppData\Local\Temp\ipykernel_17240\268115826.py:80: UserWarning: Glyph 8712 (\N{ELEMENT OF}) missing from font(s) Arial.
plt.tight_layout()
C:\Users\user\AppData\Local\Temp\ipykernel_17240\268115826.py:80: UserWarning: Glyph 8713 (\N{NOT AN ELEMENT OF}) missing from font(s) Arial.
plt.tight_layout()
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8477 (\N{DOUBLE-STRUCK CAPITAL R}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8321 (\N{SUBSCRIPT ONE}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8322 (\N{SUBSCRIPT TWO}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8712 (\N{ELEMENT OF}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8713 (\N{NOT AN ELEMENT OF}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
4. Mathematical Formulation¶
Let V be a vector space. A subset W ⊆ V is a subspace if and only if:
S1 — Contains zero: 0 ∈ W
S2 — Closed under addition: For all u, v ∈ W: u + v ∈ W
S3 — Closed under scalar multiplication: For all v ∈ W, c ∈ ℝ: cv ∈ W
Note: S1 follows from S3 (set c = 0), so in practice you only need S2 and S3. But stating S1 explicitly is useful as a quick filter.
Equivalently (single condition): W is a subspace iff it is closed under linear combinations:
For all u, v ∈ W and scalars a, b: au + bv ∈ W
Key subspaces of a matrix A (m×n):
Column space C(A): span of columns of A, a subspace of ℝᵐ
Null space N(A): all x such that Ax = 0, a subspace of ℝⁿ
Row space C(Aᵀ): span of rows of A, a subspace of ℝⁿ
Left null space N(Aᵀ): all y such that Aᵀy = 0, a subspace of ℝᵐ
5. Python Implementation¶
# --- Implementation: Subspace verification and fundamental subspaces ---
import numpy as np
def is_closed_under_addition(vectors, test_pairs=50, atol=1e-10):
"""
Test closure under addition for a set of vectors.
Strategy: sample random linear combinations and check membership
(membership approximated by checking if the projection residual is near zero).
Args:
vectors: array of shape (n_vecs, dim) spanning the candidate subspace
test_pairs: number of random pairs to test
atol: tolerance for membership check
Returns:
bool: True if closure appears to hold
"""
n = len(vectors)
rng = np.random.default_rng(42)
for _ in range(test_pairs):
# Pick two random vectors from the span
c1 = rng.standard_normal(n)
c2 = rng.standard_normal(n)
v1 = vectors.T @ c1
v2 = vectors.T @ c2
v_sum = v1 + v2
# Check if v_sum is in the span of vectors
# Project v_sum onto span(vectors) and check residual
V = vectors.T # columns are basis vectors
# Solve least squares: V @ x ≈ v_sum
x, residuals, rank, sv = np.linalg.lstsq(V, v_sum, rcond=None)
projection = V @ x
residual = np.linalg.norm(v_sum - projection)
if residual > atol:
return False
return True
def column_space_basis(A, tol=1e-10):
"""
Compute an orthonormal basis for the column space of A.
Uses QR decomposition with column pivoting.
Args:
A: matrix of shape (m, n)
tol: threshold for detecting zero singular values
Returns:
basis: array of shape (m, r) where r = rank(A)
"""
# SVD gives the most numerically stable basis
U, s, Vt = np.linalg.svd(A, full_matrices=False)
rank = np.sum(s > tol)
return U[:, :rank] # columns of U span the column space
def null_space_basis(A, tol=1e-10):
"""
Compute an orthonormal basis for the null space of A.
The null space: all x such that Ax = 0.
Args:
A: matrix of shape (m, n)
tol: threshold
Returns:
basis: array of shape (n, (n - rank)) or empty if trivial
"""
U, s, Vt = np.linalg.svd(A, full_matrices=True)
rank = np.sum(s > tol)
# The last (n - rank) rows of Vt span the null space
null_basis = Vt[rank:].T # shape (n, n-rank)
return null_basis
def verify_null_space(A, null_basis, atol=1e-10):
"""
Verify: every column of null_basis satisfies Ax = 0.
"""
for i in range(null_basis.shape[1]):
x = null_basis[:, i]
residual = np.linalg.norm(A @ x)
if residual > atol:
return False, i, residual
return True, -1, 0.0
# --- Example: Find subspaces of a 3x4 matrix ---
np.random.seed(7)
A = np.array([
[1, 2, 0, 1],
[2, 4, 1, 3],
[0, 0, 1, 1]
], dtype=float)
print(f"Matrix A ({A.shape[0]}x{A.shape[1]}):")
print(A)
print()
col_basis = column_space_basis(A)
nul_basis = null_space_basis(A)
rank = col_basis.shape[1]
nullity = nul_basis.shape[1] if nul_basis.size > 0 else 0
print(f"Rank (dimension of column space): {rank}")
print(f"Nullity (dimension of null space): {nullity}")
print(f"Rank + Nullity = {rank + nullity} = n = {A.shape[1]} ← Rank-Nullity Theorem")
print()
print("Column space basis (orthonormal):")
print(np.round(col_basis, 4))
print()
print("Null space basis:")
print(np.round(nul_basis, 4))
ok, idx, res = verify_null_space(A, nul_basis)
print(f"\nNull space verification: A @ null_basis ≈ 0? {ok}")Matrix A (3x4):
[[1. 2. 0. 1.]
[2. 4. 1. 3.]
[0. 0. 1. 1.]]
Rank (dimension of column space): 2
Nullity (dimension of null space): 2
Rank + Nullity = 4 = n = 4 ← Rank-Nullity Theorem
Column space basis (orthonormal):
[[ 0.3962 0.42 ]
[ 0.9105 -0.0653]
[ 0.1182 -0.9052]]
Null space basis:
[[-0.8746 0.2307]
[ 0.3037 -0.4248]
[-0.2672 -0.619 ]
[ 0.2672 0.619 ]]
Null space verification: A @ null_basis ≈ 0? True
6. Experiments¶
# --- Experiment 1: Which sets are subspaces? ---
# Hypothesis: A set defined by a homogeneous linear condition is a subspace;
# a set defined by an inhomogeneous condition is not.
import numpy as np
def sample_from_hyperplane(a, b, n=200):
"""
Sample vectors from {x in R^2 : a^T x = b}.
When b=0 this is a subspace; when b≠0 it is an affine subspace (not a subspace).
"""
# Parametrize: for x1 free, x2 = (b - a[0]*x1) / a[1]
x1 = np.linspace(-3, 3, n)
x2 = (b - a[0] * x1) / a[1]
return np.column_stack([x1, x2])
a = np.array([1.0, 2.0])
B_values = [0, 1, -2] # <-- modify: try different values of b
fig, axes = plt.subplots(1, 3, figsize=(14, 4))
for ax, b in zip(axes, B_values):
pts = sample_from_hyperplane(a, b)
ax.plot(pts[:, 0], pts[:, 1], 'b-', lw=2)
ax.plot(0, 0, 'ko', markersize=8)
contains_origin = abs(a @ np.array([0, 0]) - b) < 1e-10
is_sub = "SUBSPACE" if contains_origin else "NOT a subspace"
ax.set_title(f'x + 2y = {b}\n{is_sub}', fontsize=11)
ax.set_xlim(-3, 3); ax.set_ylim(-4, 4)
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.axhline(0, color='gray', lw=0.5); ax.axvline(0, color='gray', lw=0.5)
plt.suptitle('Homogeneous (b=0) vs Inhomogeneous (b≠0) Linear Constraints', fontsize=12)
plt.tight_layout(); plt.show()
print("Observation: only the line through the origin is a subspace.")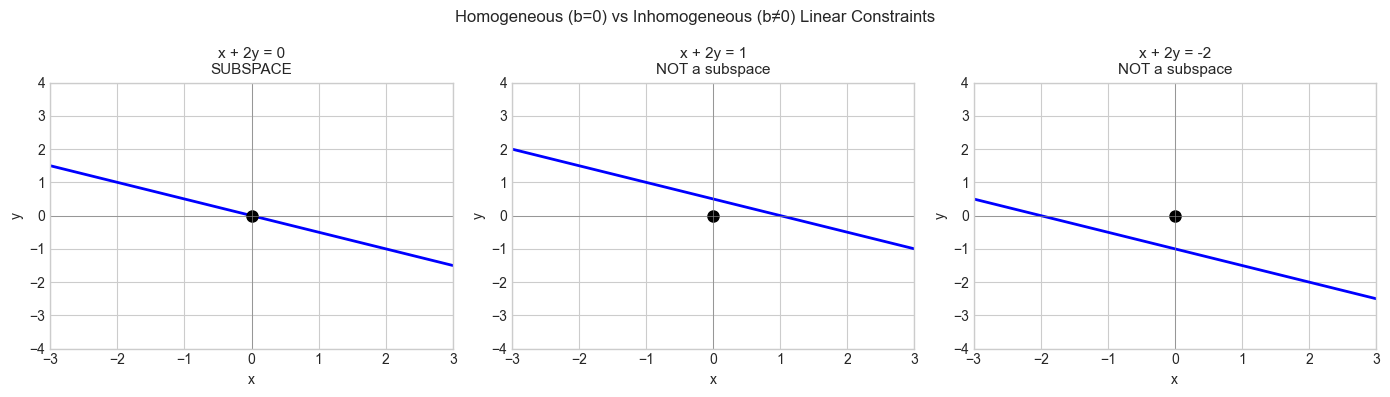
Observation: only the line through the origin is a subspace.
# --- Experiment 2: Rank-Nullity Theorem ---
# Hypothesis: For any m×n matrix, rank + nullity = n always.
# Try changing: matrix dimensions, rank, entries
import numpy as np
def check_rank_nullity(m, n, target_rank=None):
rng = np.random.default_rng(0)
if target_rank is None:
target_rank = min(m, n)
# Build a rank-deficient matrix: A = U @ V where U is m×r, V is r×n
U = rng.standard_normal((m, target_rank))
V = rng.standard_normal((target_rank, n))
A = U @ V
col_basis = column_space_basis(A)
nul_basis = null_space_basis(A)
rank = col_basis.shape[1]
nullity = nul_basis.shape[1] if nul_basis.size > 0 else 0
print(f" Matrix {m}×{n}, target_rank={target_rank}: rank={rank}, nullity={nullity}, "
f"rank+nullity={rank+nullity} (n={n}) ✓" if rank+nullity==n else " MISMATCH")
print("Rank-Nullity checks:")
for m, n, r in [(3, 5, 2), (4, 4, 3), (2, 6, 1), (5, 3, 3)]: # <-- modify these
check_rank_nullity(m, n, target_rank=r)Rank-Nullity checks:
Matrix 3×5, target_rank=2: rank=2, nullity=3, rank+nullity=5 (n=5) ✓
Matrix 4×4, target_rank=3: rank=3, nullity=1, rank+nullity=4 (n=4) ✓
Matrix 2×6, target_rank=1: rank=1, nullity=5, rank+nullity=6 (n=6) ✓
Matrix 5×3, target_rank=3: rank=3, nullity=0, rank+nullity=3 (n=3) ✓
# --- Experiment 3: Intersection of subspaces ---
# Hypothesis: The intersection of two subspaces is always a subspace.
# Two planes through the origin in R^3 intersect in a line (also through origin).
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# Plane 1: normal n1 = [1, 0, 0] → the y-z plane (x=0)
# Plane 2: normal n2 = [0, 1, 0] → the x-z plane (y=0)
# Intersection: x=0 AND y=0 → the z-axis
n1 = np.array([1.0, 0, 0]) # <-- modify: change the normal vectors
n2 = np.array([0.0, 1, 0])
# Intersection direction = n1 × n2
intersection_dir = np.cross(n1, n2)
if np.linalg.norm(intersection_dir) < 1e-10:
print("Planes are parallel (or identical) — intersection is a plane or empty")
else:
intersection_dir = intersection_dir / np.linalg.norm(intersection_dir)
print(f"Plane 1 normal: {n1}")
print(f"Plane 2 normal: {n2}")
print(f"Intersection direction (line through origin): {np.round(intersection_dir, 4)}")
print("Verify: n1 · dir =", np.dot(n1, intersection_dir).round(10), "(should be 0)")
print("Verify: n2 · dir =", np.dot(n2, intersection_dir).round(10), "(should be 0)")Plane 1 normal: [1. 0. 0.]
Plane 2 normal: [0. 1. 0.]
Intersection direction (line through origin): [0. 0. 1.]
Verify: n1 · dir = 0.0 (should be 0)
Verify: n2 · dir = 0.0 (should be 0)
7. Exercises¶
Easy 1. Show that the set W = {(x, y) ∈ ℝ² : y = 3x} is a subspace by verifying all three conditions. (Expected: manual verification with examples)
Easy 2. The set S = {(x, y) ∈ ℝ² : xy = 0} (the two coordinate axes) contains the origin and is closed under scalar multiplication. Show that it is NOT a subspace by finding two vectors in S whose sum is not in S. (Expected: a counterexample)
Medium 1. Write a function is_subspace_of_Rn(vectors, candidate) that takes a matrix vectors (whose columns span a subspace W) and a vector candidate, and tests whether candidate lies in W. Test it on the column space and null space of a matrix you construct. (Hint: use least squares projection and check the residual)
Medium 2. Construct a 4×6 matrix of rank 2. Compute its column space, null space, row space, and left null space. Verify: dim(C(A)) + dim(N(Aᵀ)) = m, and dim(C(Aᵀ)) + dim(N(A)) = n. (Coding task)
Hard. Prove algebraically that the intersection of two subspaces W₁ and W₂ of a vector space V is always a subspace. Then implement a function that, given two sets of basis vectors for W₁ and W₂ in ℝⁿ, computes a basis for their intersection. (Challenge: the computation requires solving a system of the form [A | -B]x = 0)
8. Mini Project¶
# --- Mini Project: Constraint Satisfier via Null Space ---
#
# Problem: In robotics and physics, you often have a system with constraints.
# Given a robot arm with n joints, subject to m linear constraints (Ax = b),
# the space of solutions is an affine subspace: one particular solution + null space of A.
#
# This is also how linear systems work: the general solution to Ax = b
# is x = x_particular + x_null, where x_null ∈ N(A).
#
# Task: Given a constraint matrix A and target b, find the general solution space
# and visualize the solution set.
import numpy as np
import matplotlib.pyplot as plt
# Constraint: 2x + y = 5 (1 equation, 2 unknowns → 1D solution space)
A = np.array([[2.0, 1.0]])
b = np.array([5.0])
# Step 1: Find a particular solution (minimum norm solution via pseudoinverse)
x_particular = np.linalg.lstsq(A, b, rcond=None)[0]
print(f"Particular solution: x_p = {x_particular}")
print(f"Verify Ax_p = b: {A @ x_particular} (should be {b})")
# Step 2: Find null space basis
null_basis = null_space_basis(A)
print(f"\nNull space basis:\n{null_basis}")
print(f"Null space dimension: {null_basis.shape[1]} (rank-nullity: n=2, rank=1)")
# Step 3: General solution = x_particular + t * null_basis[:,0]
t_values = np.linspace(-4, 4, 100)
solutions = x_particular[:, None] + null_basis @ (t_values[None, :]) # shape (2, 100)
# Verify all solutions satisfy the constraint
residuals = A @ solutions - b[:, None]
print(f"\nMax constraint violation over all solutions: {np.max(np.abs(residuals)):.2e}")
# Step 4: Visualize
fig, ax = plt.subplots(figsize=(7, 6))
ax.plot(solutions[0], solutions[1], 'b-', lw=2, label='Solution set (affine subspace)')
ax.plot(*x_particular, 'ro', markersize=10, label='Particular solution (min norm)')
ax.annotate('', xy=x_particular + null_basis[:, 0], xytext=x_particular,
arrowprops=dict(arrowstyle='->', color='green', lw=2))
ax.text(*(x_particular + null_basis[:, 0] + 0.1), 'null space\ndirection', fontsize=10, color='green')
ax.plot(0, 0, 'ks', markersize=8, label='Origin')
ax.set_xlim(-4, 6); ax.set_ylim(-4, 6)
ax.set_xlabel('x₁'); ax.set_ylabel('x₂')
ax.set_title('General solution to 2x₁ + x₂ = 5\n= particular solution + null space', fontsize=12)
ax.legend(); ax.set_aspect('equal')
plt.tight_layout(); plt.show()
# TODO: Try a 2-equation, 3-unknown system (solution is a line in R^3)
# TODO: Visualize the null space shifting with different b values9. Chapter Summary & Connections¶
What was covered:
A subspace is a subset closed under addition, scalar multiplication, and containing the zero vector.
The three closure conditions are necessary; failing any one disqualifies the set.
Every matrix defines four fundamental subspaces: column space, null space, row space, left null space.
The Rank-Nullity Theorem: rank(A) + nullity(A) = n (number of columns).
The general solution to Ax = b is a particular solution plus the null space — an affine subspace.
Backward connection: The notion of closure generalizes ch137’s vector space axioms — subspaces inherit all 8 axioms from the parent space.
Forward connections:
Subspaces are the foundation for ch139 (Basis and Dimension) — a basis is a minimal spanning set for a subspace.
The four fundamental subspaces reappear throughout ch151–200 (Linear Algebra), especially in ch165 (Systems of Linear Equations) and ch166 (Gaussian Elimination).
The null space is central to ch183 (Eigenvalue Computation): eigenvectors are elements of the null space of (A − λI).
Going deeper: Gilbert Strang’s Introduction to Linear Algebra devotes its first four chapters to the four fundamental subspaces — highly recommended as a companion read to Part VI.