Prerequisites: Matrix multiplication (ch154), matrix inverse (ch157) You will learn:
How Ax=b encodes a system of equations
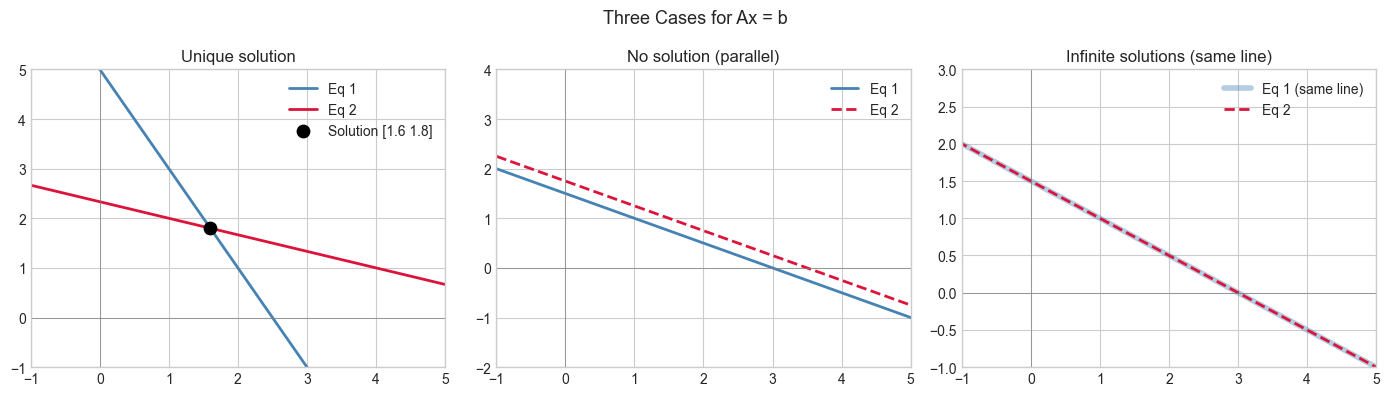
Three cases: unique solution, no solution, infinite solutions
Geometric interpretation: intersection of hyperplanes
Row echelon form and rank conditions
Environment: Python 3.x, numpy, matplotlib
# --- Systems of Linear Equations: Three cases ---
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
def classify_system(A, b):
"""
Classify Ax=b: unique, no solution, or infinite solutions.
Args:
A: 2D array (m, n)
b: 1D array (m,)
Returns:
string classification
"""
m, n = A.shape
rank_A = np.linalg.matrix_rank(A)
# Augmented matrix [A | b]
Ab = np.column_stack([A, b])
rank_Ab = np.linalg.matrix_rank(Ab)
if rank_A < rank_Ab:
return f"No solution (inconsistent): rank(A)={rank_A} < rank([A|b])={rank_Ab}"
elif rank_A == n:
return f"Unique solution: rank(A)={rank_A} = n={n}"
else:
return f"Infinite solutions: rank(A)={rank_A} < n={n}, {n-rank_A} free variables"
# Test cases
cases = [
(np.array([[2.,1.],[1.,3.]]), np.array([5., 7.])), # unique
(np.array([[1.,2.],[2.,4.]]), np.array([3., 7.])), # no solution
(np.array([[1.,2.],[2.,4.]]), np.array([3., 6.])), # infinite
(np.array([[1.,0.,1.],[0.,1.,1.],[1.,1.,2.]]), np.array([1.,2.,3.])), # infinite 3D
]
for A, b in cases:
print(classify_system(A, b))
# 2D visualization: lines as rows of Ax = b
fig, axes = plt.subplots(1, 3, figsize=(14, 4))
x = np.linspace(-2, 6, 300)
# Unique: two lines intersecting
A1 = np.array([[2.,1.],[1.,3.]]); b1 = np.array([5.,7.])
sol = np.linalg.solve(A1, b1)
axes[0].plot(x, (b1[0]-A1[0,0]*x)/A1[0,1], 'steelblue', lw=2, label='Eq 1')
axes[0].plot(x, (b1[1]-A1[1,0]*x)/A1[1,1], 'crimson', lw=2, label='Eq 2')
axes[0].scatter(*sol, color='black', zorder=5, s=80, label=f'Solution {sol.round(2)}')
axes[0].set_xlim(-1,5); axes[0].set_ylim(-1,5); axes[0].legend(); axes[0].set_title('Unique solution')
# No solution: parallel lines
A2 = np.array([[1.,2.],[2.,4.]]); b2 = np.array([3.,7.])
axes[1].plot(x, (b2[0]-A2[0,0]*x)/A2[0,1], 'steelblue', lw=2, label='Eq 1')
axes[1].plot(x, (b2[1]-A2[1,0]*x)/A2[1,1], 'crimson', lw=2, linestyle='--', label='Eq 2')
axes[1].set_xlim(-1,5); axes[1].set_ylim(-2,4); axes[1].legend(); axes[1].set_title('No solution (parallel)')
# Infinite: same line
A3 = np.array([[1.,2.],[2.,4.]]); b3 = np.array([3.,6.])
axes[2].plot(x, (b3[0]-A3[0,0]*x)/A3[0,1], 'steelblue', lw=4, alpha=0.4, label='Eq 1 (same line)')
axes[2].plot(x, (b3[1]-A3[1,0]*x)/A3[1,1], 'crimson', lw=2, linestyle='--', label='Eq 2')
axes[2].set_xlim(-1,5); axes[2].set_ylim(-1,3); axes[2].legend(); axes[2].set_title('Infinite solutions (same line)')
for ax in axes: ax.axhline(0,color='gray',lw=0.5); ax.axvline(0,color='gray',lw=0.5)
plt.suptitle('Three Cases for Ax = b', fontsize=13); plt.tight_layout(); plt.show()Unique solution: rank(A)=2 = n=2
No solution (inconsistent): rank(A)=1 < rank([A|b])=2
Infinite solutions: rank(A)=1 < n=2, 1 free variables
Infinite solutions: rank(A)=2 < n=3, 1 free variables
4. Mathematical Formulation¶
System of m equations in n unknowns:
a₁₁x₁ + a₁₂x₂ + ... + a₁ₙxₙ = b₁
a₂₁x₁ + a₂₂x₂ + ... + a₂ₙxₙ = b₂
...
aₘ₁x₁ + aₘ₂x₂ + ... + aₘₙxₙ = bₘ
Written as: Ax = b
Solvability (Rouché-Capelli theorem):
rank(A) < rank([A|b]) → no solution
rank(A) = rank([A|b]) = n → unique solution
rank(A) = rank([A|b]) < n → infinite solutions (family of dimension n - rank(A))7. Exercises¶
Easy 1. Write the system 2x+y=5, 3x-y=10 as a matrix equation Ax=b. Solve by hand.
Easy 2. What does it mean geometrically if a 3×3 system has infinite solutions?
Medium 1. Use classify_system to explore: for what values of k does [[k,1],[2,3]]x = [4,6] have (a) a unique solution, (b) no solution, (c) infinite solutions?
Medium 2. Solve a 5×5 random system 100 times and record the condition number. What does a high condition number mean for numerical accuracy of the solution?
Hard. Implement null_space(A) that returns a basis for the null space of A (all x such that Ax=0). Use SVD: the null space basis is the right singular vectors corresponding to singular values ≈ 0.
9. Chapter Summary & Connections¶
Ax=bhas: (1) unique solution if rank(A)=n; (2) no solution if rank inconsistency; (3) ∞ solutions if rank(A)<n.Geometrically: each equation is a hyperplane; the solution is their intersection.
Forward connections:
In ch161 (Gaussian Elimination), we compute the solution systematically.
In ch168 (Projection Matrices), the case ‘no exact solution’ leads to least-squares via orthogonal projection.