Prerequisites: Trigonometry (ch102–103), matrix visualization (ch165) You will learn:
2D rotation matrix derivation from first principles
3D rotation matrices (Rx, Ry, Rz) and their composition
Gimbal lock: why Euler angles are problematic
Orthogonal matrices and why rotation matrices satisfy RᵀR = I
Environment: Python 3.x, numpy, matplotlib
# --- 2D and 3D Rotation Matrices ---
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
def rot2d(theta):
"""2D rotation matrix: rotates counterclockwise by theta radians."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[c, -s],
[s, c]])
def rotx(theta):
"""3D rotation about x-axis by theta radians."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[1,0,0],[0,c,-s],[0,s,c]])
def roty(theta):
"""3D rotation about y-axis by theta radians."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[c,0,s],[0,1,0],[-s,0,c]])
def rotz(theta):
"""3D rotation about z-axis by theta radians."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[c,-s,0],[s,c,0],[0,0,1]])
# Verify properties of rotation matrices
R = rot2d(np.pi/3)
print("2D rotation (60°):")
print(f" R =\n{np.round(R,4)}")
print(f" det(R) = {np.linalg.det(R):.4f} (should be 1)")
print(f" RᵀR = I: {np.allclose(R.T @ R, np.eye(2))}")
print(f" Rᵀ = R⁻¹: {np.allclose(R.T, np.linalg.inv(R))}\n")
# 3D rotation composition
Rx = rotx(np.pi/6); Ry = roty(np.pi/4); Rz = rotz(np.pi/3)
R3 = Rz @ Ry @ Rx
print(f"3D composed rotation: det={np.linalg.det(R3):.4f}, RᵀR=I: {np.allclose(R3.T@R3, np.eye(3))}")
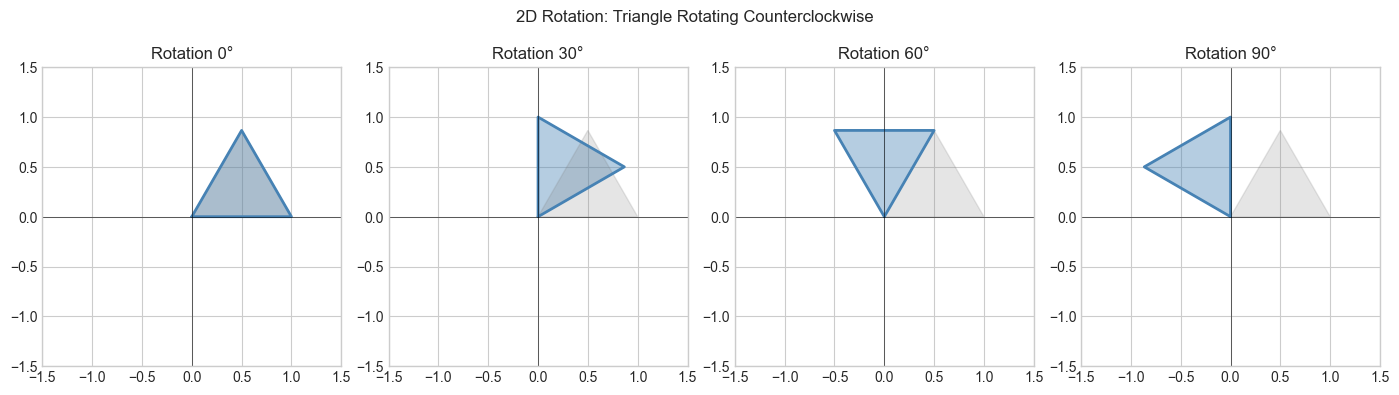
# Visualization: rotate a triangle
triangle = np.array([[0,1,0.5,0],[0,0,0.866,0]], dtype=float)
fig, axes = plt.subplots(1, 4, figsize=(14, 4))
angles = [0, np.pi/6, np.pi/3, np.pi/2]
labels = ['0°','30°','60°','90°']
for ax, theta, label in zip(axes, angles, labels):
R = rot2d(theta)
rotated = R @ triangle
ax.fill(rotated[0], rotated[1], alpha=0.4, color='steelblue')
ax.plot(rotated[0], rotated[1], 'steelblue', lw=2)
ax.fill(triangle[0], triangle[1], alpha=0.2, color='gray')
ax.set_xlim(-1.5,1.5); ax.set_ylim(-1.5,1.5); ax.set_aspect('equal')
ax.axhline(0,color='k',lw=0.4); ax.axvline(0,color='k',lw=0.4)
ax.set_title(f'Rotation {label}')
plt.suptitle('2D Rotation: Triangle Rotating Counterclockwise', fontsize=12)
plt.tight_layout(); plt.show()2D rotation (60°):
R =
[[ 0.5 -0.866]
[ 0.866 0.5 ]]
det(R) = 1.0000 (should be 1)
RᵀR = I: True
Rᵀ = R⁻¹: True
3D composed rotation: det=1.0000, RᵀR=I: True
4. Mathematical Formulation¶
2D rotation by θ (counterclockwise):
R(θ) = [[cos θ, -sin θ],
[sin θ, cos θ]]
Derivation: e₁=[1,0] maps to [cos θ, sin θ]; e₂=[0,1] maps to [-sin θ, cos θ]
3D rotations about coordinate axes:
Rx(θ): [[1,0,0],[0,c,-s],[0,s,c]] c=cos θ, s=sin θ
Ry(θ): [[c,0,s],[0,1,0],[-s,0,c]]
Rz(θ): [[c,-s,0],[s,c,0],[0,0,1]]
Key properties of rotation matrices (orthogonal matrices):
RᵀR = I (columns/rows are orthonormal)
det(R) = 1 (preserves orientation AND volume)
R⁻¹ = Rᵀ (inverse is free — just transpose)
R(θ₁) @ R(θ₂) = R(θ₁+θ₂) (compose = add angles, for 2D)7. Exercises¶
Easy 1. What is rot2d(π/2) @ rot2d(π/2)? Compute and interpret.
Easy 2. Verify that rotx(θ) has det=1 and satisfies RᵀR=I for θ=π/7.
Medium 1. Implement rot_axis_angle(axis, theta) that rotates about an arbitrary unit vector axis using Rodrigues’ rotation formula.
Medium 2. Show that 3D rotations about different axes don’t commute: Rx @ Ry ≠ Ry @ Rx. Visualize the difference by rotating a cube.
Hard. Demonstrate gimbal lock: find a sequence of Euler angles where two rotation axes align (one degree of freedom is lost). Show that rotating Rz @ Ry(π/2) @ Rx achieves the same rotation as Rz @ Rx (the y rotation fused x and z).
9. Chapter Summary & Connections¶
2D rotation:
R(θ) = [[cos θ, -sin θ],[sin θ, cos θ]]. Derived from where basis vectors land.Rotation matrices are orthogonal:
RᵀR = I,det(R) = 1,R⁻¹ = Rᵀ.3D rotations don’t commute; Euler angle order matters (connects to ch114 — Affine Transformations).
Forward connections:
In ch172 (Diagonalization), rotation matrices appear as the Q in eigendecomposition.
In ch177 (Linear Algebra for Neural Networks), orthogonal weight matrices preserve gradient norms during backpropagation.