Prerequisites: ch053 (Domain and Range), ch054 (Function Composition)
You will learn:
Definition of an inverse function f⁻¹
The condition for invertibility: bijectivity
How to compute inverses analytically and numerically
Common inverse pairs and their computational uses
Environment: Python 3.x, numpy, matplotlib
1. Concept¶
The inverse of a function f : A → B is a function f⁻¹ : B → A such that:
f⁻¹(f(x)) = x for all x ∈ A (f⁻¹ undoes f)
f(f⁻¹(y)) = y for all y ∈ B (f undoes f⁻¹)
In terms of composition: f⁻¹ ∘ f = id_A and f ∘ f⁻¹ = id_B.
Invertibility condition: f is invertible if and only if it is bijective — both injective and surjective (introduced in ch053).
If f is not injective, two inputs map to the same output — we cannot reverse the mapping uniquely.
If f is not surjective, some output y has no pre-image — f⁻¹(y) is undefined.
Common inverse pairs:
exp and log: log(exp(x)) = x
x² (on x≥0) and √x: √(x²) = x for x≥0
sin (on [-π/2, π/2]) and arcsin
addition of c and subtraction of c
Critical note: f⁻¹ is NOT 1/f. The superscript -1 denotes the inverse function, not the reciprocal. f⁻¹(x) ≠ 1/f(x) in general.
2. Intuition & Mental Models¶
Physical analogy: The inverse is the undo operation. Encoding and decoding are inverses. Encryption and decryption are inverses (when the key is known). Forward and backward passes in a physical process are inverses.
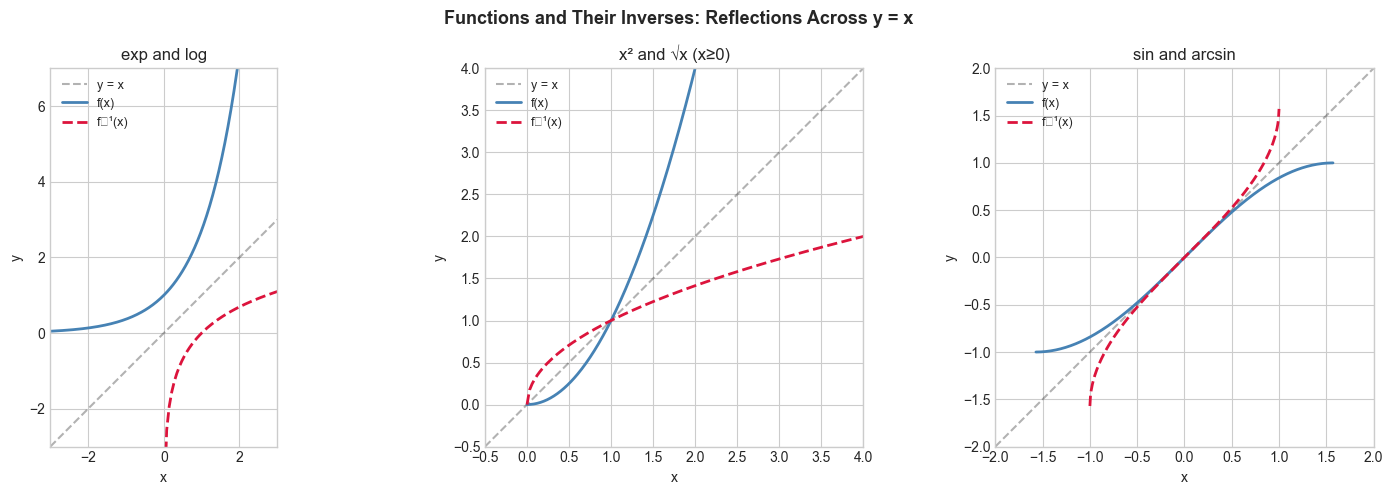
Geometric interpretation: The graph of f⁻¹ is the reflection of the graph of f across the line y = x. If (a, b) is on f’s graph, then (b, a) is on f⁻¹’s graph.
Computational analogy: Serialization (object → bytes) and deserialization (bytes → object) are inverses. Compression and decompression are inverses. Hash functions are NOT invertible by design — they are many-to-one (not injective).
3. Visualization¶
# --- Visualization: Functions and their inverses (reflection across y=x) ---
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
pairs = [
('exp and log',
np.linspace(-3, 3, 300), np.exp,
np.linspace(0.01, 20, 300), np.log,
(-3, 3), (-3, 7)),
('x² and √x (x≥0)',
np.linspace(0, 3, 300), lambda x: x**2,
np.linspace(0, 9, 300), np.sqrt,
(-0.5, 4), (-0.5, 4)),
('sin and arcsin',
np.linspace(-np.pi/2, np.pi/2, 300), np.sin,
np.linspace(-1, 1, 300), np.arcsin,
(-2, 2), (-2, 2)),
]
for ax, (name, x1, f1, x2, f2, xlim, ylim) in zip(axes, pairs):
diag = np.linspace(min(xlim), max(xlim), 200)
ax.plot(diag, diag, 'k--', alpha=0.3, label='y = x')
ax.plot(x1, f1(x1), color='steelblue', linewidth=2, label='f(x)')
ax.plot(x2, f2(x2), color='crimson', linewidth=2, linestyle='--', label='f⁻¹(x)')
ax.set_xlim(xlim)
ax.set_ylim(ylim)
ax.set_title(name)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.legend(fontsize=9)
ax.set_aspect('equal', adjustable='box')
plt.suptitle('Functions and Their Inverses: Reflections Across y = x', fontsize=13, fontweight='bold')
plt.tight_layout()
plt.show()C:\Users\user\AppData\Local\Temp\ipykernel_25056\1621539316.py:37: UserWarning: Glyph 8315 (\N{SUPERSCRIPT MINUS}) missing from font(s) Arial.
plt.tight_layout()
c:\Users\user\OneDrive\Documents\book\.venv\Lib\site-packages\IPython\core\pylabtools.py:170: UserWarning: Glyph 8315 (\N{SUPERSCRIPT MINUS}) missing from font(s) Arial.
fig.canvas.print_figure(bytes_io, **kw)
4. Mathematical Formulation¶
Algebraic method to find f⁻¹: Given y = f(x), solve for x in terms of y. That gives x = f⁻¹(y).
Example: f(x) = 3x + 2
y = 3x + 2
y - 2 = 3x
x = (y - 2) / 3
So f⁻¹(y) = (y - 2) / 3
Numerical method: For a monotone function, the inverse can be found by interpolation — swap x and y coordinates.
# --- Mathematical Formulation: Numerical inverse via interpolation ---
import numpy as np
def numerical_inverse(f, domain_min, domain_max, n=10000):
"""
Compute the numerical inverse of a monotone function f.
Swaps x and y coordinates, then creates an interpolating function.
Args:
f: callable, strictly monotone function
domain_min, domain_max: float, domain of f
n: int, resolution
Returns:
callable: numerical approximation of f⁻¹
"""
x = np.linspace(domain_min, domain_max, n)
y = f(x)
# Swap: the inverse takes y as input and returns x
# np.interp requires sorted x — y must be monotone
return lambda y_query: np.interp(y_query, y, x)
# Test: numerical inverse of x^3 (strictly monotone on all reals)
cube = lambda x: x**3
cbrt_numerical = numerical_inverse(cube, -10, 10)
cbrt_exact = lambda x: np.cbrt(x)
test_y = np.array([-27, -8, -1, 0, 1, 8, 27])
print("y:", test_y)
print("Numerical cbrt:", cbrt_numerical(test_y).round(4))
print("Exact cbrt: ", cbrt_exact(test_y).round(4))
# Verify round-trip: f⁻¹(f(x)) = x
test_x = np.array([-3.0, -1.0, 0.0, 1.0, 3.0])
roundtrip = cbrt_numerical(cube(test_x))
print("\nRound-trip check f⁻¹(f(x)) ≈ x:")
print("x: ", test_x)
print("f⁻¹(f(x)): ", roundtrip.round(4))y: [-27 -8 -1 0 1 8 27]
Numerical cbrt: [-3. -2. -1. 0. 1. 2. 3.]
Exact cbrt: [-3. -2. -1. 0. 1. 2. 3.]
Round-trip check f⁻¹(f(x)) ≈ x:
x: [-3. -1. 0. 1. 3.]
f⁻¹(f(x)): [-3. -1. 0. 1. 3.]
5. Python Implementation¶
# --- Implementation: Invertible transformation class ---
import numpy as np
class InvertibleTransform:
"""
Pairs a function with its inverse, enforcing the round-trip property.
Used in feature preprocessing where you need to undo transformations.
"""
def __init__(self, forward, inverse, name='transform'):
"""
Args:
forward: callable, the function f
inverse: callable, the function f⁻¹
name: str, label for display
"""
self.forward = forward
self.inverse = inverse
self.name = name
def __call__(self, x):
return self.forward(x)
def undo(self, y):
return self.inverse(y)
def verify(self, test_values, tolerance=1e-6):
"""Verify f⁻¹(f(x)) ≈ x for test values."""
roundtrip = self.inverse(self.forward(test_values))
max_error = np.max(np.abs(roundtrip - test_values))
return max_error < tolerance, max_error
# Common ML preprocessing transforms with their inverses
log_transform = InvertibleTransform(
forward=np.log1p, # log(1 + x) — works for x >= 0
inverse=np.expm1, # exp(x) - 1
name='log1p/expm1'
)
test = np.array([0.0, 1.0, 10.0, 100.0, 1000.0])
encoded = log_transform(test)
decoded = log_transform.undo(encoded)
print("Original: ", test)
print("Encoded: ", encoded.round(4))
print("Decoded: ", decoded.round(4))
ok, err = log_transform.verify(test)
print(f"Round-trip verified: {ok} (max error: {err:.2e})")Original: [ 0. 1. 10. 100. 1000.]
Encoded: [0. 0.6931 2.3979 4.6151 6.9088]
Decoded: [ 0. 1. 10. 100. 1000.]
Round-trip verified: True (max error: 1.14e-13)
6. Experiments¶
# --- Experiment 1: Breaking invertibility by removing injectivity ---
# Hypothesis: f(x)=x² is not invertible over all reals because it maps -2 and 2 to 4.
import numpy as np
RESTRICT_TO_POSITIVE = True # <-- try changing to False
if RESTRICT_TO_POSITIVE:
domain = np.linspace(0, 5, 1000) # restricted: x >= 0
label = "Restricted domain [0, ∞)"
else:
domain = np.linspace(-5, 5, 1000) # full domain: not injective!
label = "Full domain (-∞, ∞)"
f = lambda x: x**2
y_vals = f(domain)
# Attempt numerical inverse
try:
f_inv = lambda y_q: np.interp(y_q, y_vals, domain)
test = np.array([0, 4, 9, 16, 25])
inv_result = f_inv(test)
print(f"{label}:")
print(f" f⁻¹([0, 4, 9, 16, 25]) = {inv_result.round(2)}")
if not RESTRICT_TO_POSITIVE:
print(" WARNING: Non-injective domain — inverse is ambiguous (always returns positive branch)")
except Exception as e:
print(f"Error: {e}")Restricted domain [0, ∞):
f⁻¹([0, 4, 9, 16, 25]) = [0. 2. 3. 4. 5.]
7. Exercises¶
Easy 1. Find the inverse of f(x) = (5x - 3) / 2 algebraically. Verify computationally that f(f⁻¹(y)) = y for y ∈ {-5, 0, 5, 10}. (Expected: f⁻¹(y) = (2y + 3)/5)
Easy 2. Explain why f(x) = x² has no inverse over ℝ but does have an inverse if restricted to [0, ∞). What about [-∞, 0]? What would each restriction give as f⁻¹? (Expected: two different square root functions)
Medium 1. Implement the horizontal line test: given sample points (x, y) of a function, check whether any y-value is achieved by more than one x-value. This tests surjectivity. Write horizontal_line_test(x, y, tolerance=1e-6). (Hint: parallel to the vertical line test from ch051)
Medium 2. Build an InvertibleTransform for z-score normalization: forward is (x - mean) / std, inverse is z * std + mean. Fit on a training set, then apply and undo on a test set. Verify the undo is exact. (Hint: capture mean and std in closures)
Hard. Newton’s method finds x such that f(x) = y — equivalently, it computes f⁻¹(y). Implement Newton’s method numerically (using finite-difference derivatives) and use it to compute f⁻¹ for f(x) = x³ + x (which has no closed-form inverse). Verify against scipy.optimize.brentq if available, otherwise by checking f(f⁻¹(y)) ≈ y. (Challenge: how does convergence rate change with your initial guess?)
8. Mini Project¶
# --- Mini Project: Invertible Preprocessing Pipeline ---
# Problem: In forecasting, you often transform a time series (log, normalize, etc.)
# to make it easier to model, then invert the transformations to get
# predictions in the original scale.
# Dataset: Simulated exponential time series (like revenue or user count).
# Task: Transform → fit trend → predict → invert → compare with actual.
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
# Generate data: exponential growth with noise
np.random.seed(3)
n = 100
t = np.arange(n)
true_signal = 100 * np.exp(0.03 * t)
observed = true_signal * np.exp(np.random.normal(0, 0.05, n))
# Step 1: Log transform (makes exponential linear)
log_observed = np.log(observed)
# Step 2: Fit linear trend on log-transformed data (least squares)
A = np.column_stack([t, np.ones(n)])
coeffs, _, _, _ = np.linalg.lstsq(A, log_observed, rcond=None)
slope, intercept = coeffs
log_predicted = slope * t + intercept
# Step 3: Invert log transform to get predictions in original scale
predicted = np.exp(log_predicted)
# Plot
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
axes[0].plot(t, log_observed, 'o', markersize=2, color='gray', label='log(observed)')
axes[0].plot(t, log_predicted, color='crimson', linewidth=2, label='linear fit on log scale')
axes[0].set_title('Log-Transformed Space')
axes[0].set_xlabel('t')
axes[0].set_ylabel('log(value)')
axes[0].legend()
axes[1].plot(t, observed, 'o', markersize=2, color='gray', label='observed')
axes[1].plot(t, predicted, color='steelblue', linewidth=2, label='predicted (inverted)')
axes[1].plot(t, true_signal, color='darkgreen', linewidth=1.5, linestyle='--', label='true signal')
axes[1].set_title('Original Scale (after inverting log)')
axes[1].set_xlabel('t')
axes[1].set_ylabel('value')
axes[1].legend()
plt.suptitle('Invertible Transform: Log → Fit → Invert', fontsize=12, fontweight='bold')
plt.tight_layout()
plt.show()
print(f"Estimated growth rate: {slope:.4f} (true: 0.03)")
print(f"Estimated initial value: {np.exp(intercept):.2f} (true: 100)")9. Chapter Summary & Connections¶
What we covered:
f⁻¹ is the function that undoes f; defined by f⁻¹ ∘ f = id
A function is invertible if and only if it is bijective (injective + surjective)
f⁻¹ ≠ 1/f — notation collision to be careful of
Numerical inversion via interpolation works for monotone functions
Backward connection: This completes the function composition triangle from ch054 — inverses are compositions that produce the identity.
Forward connections:
In ch171 (Matrix Inverse), we will see the same concept applied to linear functions represented as matrices
The log-transform inverse pattern in the Mini Project reappears in ch286 (Regression) where log transforms stabilize variance
In ch251 (Bayes Theorem), conditional probability ‘inverts’ the direction of inference — same structural idea