Prerequisites: Matrix representation (ch152), matrix multiplication (ch154) You will learn:
What the transpose does geometrically
Properties: (AB)ᵀ = BᵀAᵀ, (Aᵀ)ᵀ = A
Symmetric matrices and why they arise everywhere in ML
How transpose appears in dot products, covariance, and the normal equations
Environment: Python 3.x, numpy, matplotlib
1. Concept¶
The transpose of an m×n matrix A is the n×m matrix Aᵀ where rows and columns are swapped: Aᵀ[i,j] = A[j,i].
Geometrically, the transpose is related to the adjoint of the transformation — intuitively, the transformation that “undoes” the geometry in the dual space. For orthogonal matrices (rotations), Aᵀ = A⁻¹ — the transpose is the inverse.
Practically, transpose appears everywhere:
Dot product:
u·v = uᵀvCovariance matrix:
Σ = XᵀX / nNormal equations:
(AᵀA)x = AᵀbBackpropagation: gradients flow through transposes
Common misconceptions:
“(AB)ᵀ = AᵀBᵀ” — False. It reverses:
(AB)ᵀ = BᵀAᵀ.“The transpose is its own inverse.” — Only for orthogonal matrices.
2. Intuition & Mental Models¶
Geometric: The transpose reflects the matrix across its main diagonal. For a transformation A that maps column vectors, Aᵀ maps row vectors. If A maps ℝⁿ → ℝᵐ, then Aᵀ maps ℝᵐ → ℝⁿ.
Computational: Think of transpose as re-indexing: instead of A[row][col], you read A[col][row]. This is why column access in a C-order array can be accelerated by transposing first.
Recall from ch131 (Dot Product Intuition) that u·v = Σᵢ uᵢvᵢ. Written as matrix-vector product: u·v = uᵀv where u is treated as a row vector.
3. Visualization¶
# --- Visualization: Transpose as reflection across the diagonal ---
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
A = np.array([[1, 2, 3],
[4, 5, 6]], dtype=float) # shape: 2x3
AT = A.T # shape: 3x2
fig, axes = plt.subplots(1, 2, figsize=(10, 4))
for ax, mat, title in zip(axes, [A, AT], ['A (2×3)', 'Aᵀ (3×2)']):
im = ax.imshow(mat, cmap='RdBu', vmin=-7, vmax=7, aspect='auto')
for (r, c), val in np.ndenumerate(mat):
ax.text(c, r, f'{val:.0f}', ha='center', va='center', fontsize=14, color='white' if abs(val) > 3 else 'black')
ax.set_title(title, fontsize=12)
ax.set_xticks(range(mat.shape[1])); ax.set_yticks(range(mat.shape[0]))
ax.set_xlabel('Column'); ax.set_ylabel('Row')
plt.suptitle('Transpose: Rows ↔ Columns', fontsize=13)
plt.tight_layout()
plt.show()
# Key property: (AB)ᵀ = BᵀAᵀ
np.random.seed(1)
X = np.random.randn(3, 4)
Y = np.random.randn(4, 5)
lhs = (X @ Y).T
rhs = Y.T @ X.T
print(f"(AB)ᵀ = BᵀAᵀ holds: {np.allclose(lhs, rhs)}")
print(f"(AB)ᵀ shape: {lhs.shape}, BᵀAᵀ shape: {rhs.shape}")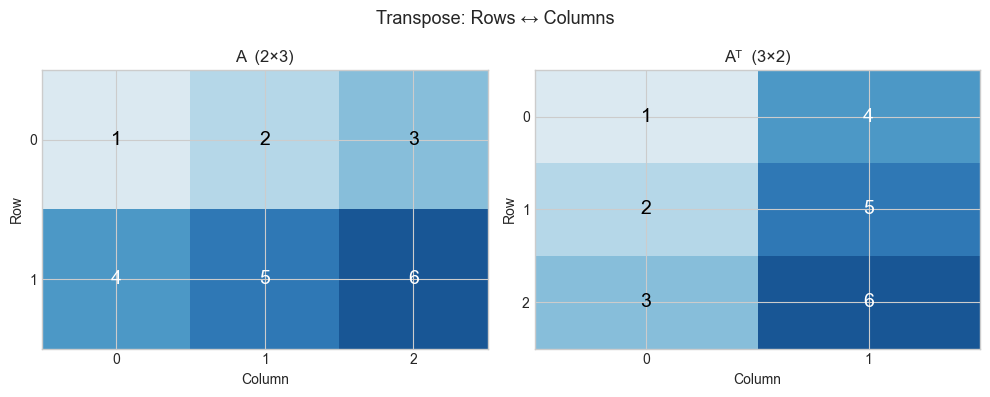
(AB)ᵀ = BᵀAᵀ holds: True
(AB)ᵀ shape: (5, 3), BᵀAᵀ shape: (5, 3)
4. Mathematical Formulation¶
Definition: Aᵀ[i,j] = A[j,i]
Shape: A is (m×n) → Aᵀ is (n×m)
Properties:
(Aᵀ)ᵀ = A [double transpose is identity]
(A + B)ᵀ = Aᵀ + Bᵀ [transpose distributes over addition]
(αA)ᵀ = αAᵀ [scalar factors pass through]
(AB)ᵀ = BᵀAᵀ [REVERSAL — not AᵀBᵀ]
(ABC)ᵀ = CᵀBᵀAᵀ [full reversal for long products]
Symmetric matrix: A = Aᵀ (requires A to be square)
AᵀA is ALWAYS symmetric: (AᵀA)ᵀ = Aᵀ(Aᵀ)ᵀ = AᵀA ✓# --- Implementation: Transpose operations and symmetric matrices ---
import numpy as np
def my_transpose(A):
"""
Compute matrix transpose without using .T.
Args:
A: 2D numpy array, shape (m, n)
Returns:
2D numpy array, shape (n, m)
"""
m, n = A.shape
AT = np.empty((n, m), dtype=A.dtype)
for i in range(m):
for j in range(n):
AT[j, i] = A[i, j]
return AT
A = np.array([[1,2,3],[4,5,6]], dtype=float)
print(f"My transpose:\n{my_transpose(A)}")
print(f"NumPy .T:\n{A.T}")
print(f"Match: {np.allclose(my_transpose(A), A.T)}")
print()
# AᵀA is always symmetric
np.random.seed(3)
M = np.random.randn(5, 3)
S = M.T @ M # 3x3 symmetric matrix
print(f"M.T @ M symmetric: {np.allclose(S, S.T)}")
print(f"Shape: {M.shape} → {S.shape}")
print()
# Gram matrix: used in kernel methods, style transfer, etc.
print("Gram matrix (covariance-like):")
X = np.random.randn(4, 100) # 4 features, 100 samples
cov = X @ X.T / 100 # 4x4 covariance matrix
print(f"Cov shape: {cov.shape}, symmetric: {np.allclose(cov, cov.T)}")My transpose:
[[1. 4.]
[2. 5.]
[3. 6.]]
NumPy .T:
[[1. 4.]
[2. 5.]
[3. 6.]]
Match: True
M.T @ M symmetric: True
Shape: (5, 3) → (3, 3)
Gram matrix (covariance-like):
Cov shape: (4, 4), symmetric: True
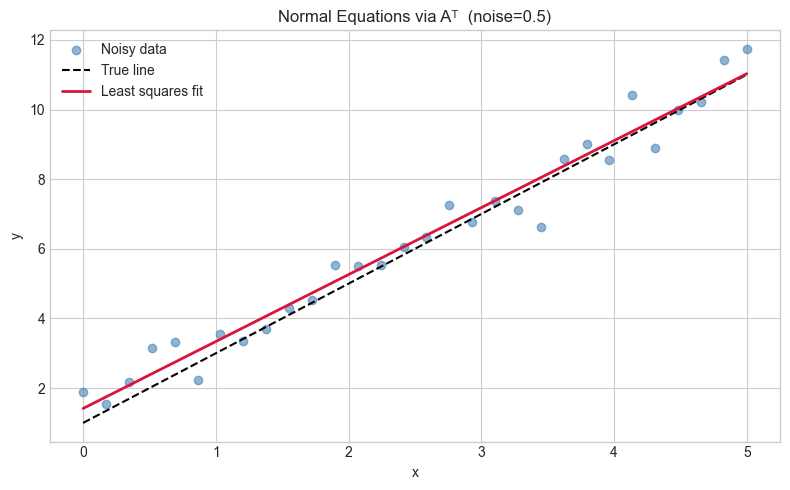
6. Experiments¶
# --- Experiment: Transpose and the normal equations ---
# Hypothesis: The least-squares solution x* = (AᵀA)⁻¹Aᵀb minimizes ||Ax-b||²
# Try changing: NOISE_LEVEL
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
NOISE_LEVEL = 0.5 # <-- try 0.1, 1.0, 3.0
np.random.seed(0)
# True line: y = 2x + 1
x_data = np.linspace(0, 5, 30)
y_true = 2 * x_data + 1
y_noisy = y_true + NOISE_LEVEL * np.random.randn(len(x_data))
# Design matrix A: [x, 1] for each sample
A = np.column_stack([x_data, np.ones(len(x_data))]) # (30, 2)
b = y_noisy # (30,)
# Normal equations: x* = (AᵀA)⁻¹Aᵀb
ATA = A.T @ A # (2, 2)
ATb = A.T @ b # (2,)
x_star = np.linalg.solve(ATA, ATb) # solve rather than invert (numerically better)
print(f"Fitted: slope={x_star[0]:.4f}, intercept={x_star[1]:.4f}")
print(f"True: slope=2.0000, intercept=1.0000")
plt.figure(figsize=(8,5))
plt.scatter(x_data, y_noisy, color='steelblue', alpha=0.6, label='Noisy data')
plt.plot(x_data, y_true, 'k--', label='True line')
plt.plot(x_data, A @ x_star, 'crimson', lw=2, label='Least squares fit')
plt.legend(); plt.xlabel('x'); plt.ylabel('y')
plt.title(f'Normal Equations via Aᵀ (noise={NOISE_LEVEL})')
plt.tight_layout(); plt.show()Fitted: slope=1.9227, intercept=1.4146
True: slope=2.0000, intercept=1.0000
7. Exercises¶
Easy 1. Compute by hand: transpose [[1,2,3],[4,5,6]]. What is the shape before and after?
Easy 2. Is [[1,2],[2,5]] symmetric? Is [[0,1],[-1,0]] symmetric? What is the latter called?
Medium 1. Prove that for any matrix A, A + Aᵀ is always symmetric and A - Aᵀ is always skew-symmetric (equal to its own negated transpose). Verify with a random 4×4 matrix.
Medium 2. Write a function is_orthogonal(A, tol=1e-9) that returns True if A.T @ A ≈ I. Test on: (a) a random matrix, (b) a rotation matrix, (c) a reflection matrix.
Hard. Show that any matrix A can be decomposed as A = S + K where S is symmetric and K is skew-symmetric. Give the formulas for S and K in terms of A and Aᵀ. Implement and verify.
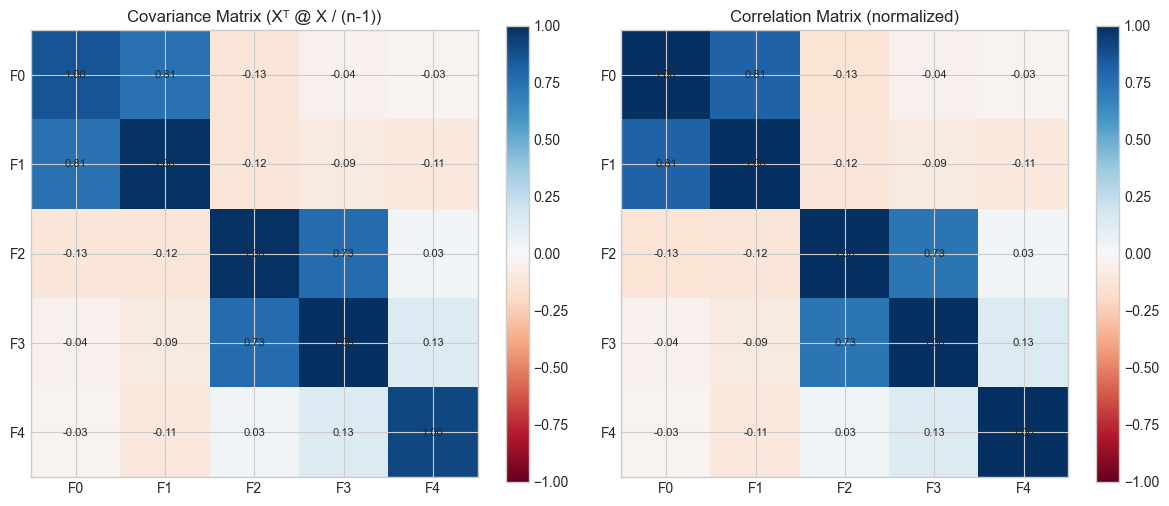
8. Mini Project¶
# --- Mini Project: Covariance matrix via transpose ---
# Problem: Given a dataset, compute the covariance matrix using only
# matrix operations (no loops, no np.cov call until verification).
# Then visualize which features are most correlated.
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
np.random.seed(42)
# Generate correlated data: 5 features, 200 samples
# True covariance structure has correlations between features 0-1, 2-3
L = np.array([[1,0,0,0,0],[0.8,0.6,0,0,0],[0,0,1,0,0],[0,0,0.7,0.71,0],[0,0,0,0,1]])
data = (L @ np.random.randn(5, 200)).T # (200, 5)
# Step 1: Center the data (subtract column means)
means = data.mean(axis=0) # shape (5,)
X_centered = data - means # broadcasting: subtract mean from each row
# Step 2: Compute covariance matrix C = (1/n) * Xᵀ @ X (each feature is a row)
n = data.shape[0]
C = (X_centered.T @ X_centered) / (n - 1) # unbiased estimate
# Verify against numpy
C_numpy = np.cov(data.T)
print(f"Max difference from np.cov: {np.max(np.abs(C - C_numpy)):.2e}")
# Visualize
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
feature_names = ['F0','F1','F2','F3','F4']
# Covariance matrix
im1 = axes[0].imshow(C, cmap='RdBu', vmin=-1, vmax=1)
axes[0].set_title('Covariance Matrix (Xᵀ @ X / (n-1))')
axes[0].set_xticks(range(5)); axes[0].set_yticks(range(5))
axes[0].set_xticklabels(feature_names); axes[0].set_yticklabels(feature_names)
plt.colorbar(im1, ax=axes[0])
# Correlation matrix (normalize by std)
std = np.sqrt(np.diag(C))
corr = C / np.outer(std, std)
im2 = axes[1].imshow(corr, cmap='RdBu', vmin=-1, vmax=1)
axes[1].set_title('Correlation Matrix (normalized)')
axes[1].set_xticks(range(5)); axes[1].set_yticks(range(5))
axes[1].set_xticklabels(feature_names); axes[1].set_yticklabels(feature_names)
plt.colorbar(im2, ax=axes[1])
for ax in axes:
for (r,c), val in np.ndenumerate(corr):
ax.text(c, r, f'{val:.2f}', ha='center', va='center', fontsize=8)
plt.tight_layout(); plt.show()Max difference from np.cov: 1.39e-17
9. Chapter Summary & Connections¶
Transpose flips rows and columns:
Aᵀ[i,j] = A[j,i].Key reversal rule:
(AB)ᵀ = BᵀAᵀ— order reverses.AᵀAis always symmetric and positive semi-definite — it is the covariance structure of A.The normal equations
(AᵀA)x = Aᵀbsolve least squares (reappears in ch181 — Linear Regression via Matrix Algebra).
Backward connection: The dot product u·v = uᵀv connects to ch131 — we are just writing it in matrix notation.
Forward connections:
In ch168 (Projection Matrices), the formula
P = A(AᵀA)⁻¹Aᵀwill use transpose in a deep geometric way.In ch176 (Matrix Calculus), the gradient of
||Ax-b||²with respect to x is2Aᵀ(Ax-b)— transpose appears in every gradient.