Prerequisites: ch154 (matrix multiplication), ch164–ch168 (linear transformations, rotation, scaling, projection), ch173 (SVD), ch185 (matrix transformation playground — 2D) Part VI Project — Linear Algebra (chapters 151–200) Difficulty: Intermediate | Estimated time: 60–90 minutes Output: A 3D transformation pipeline: Euler rotations, homogeneous coordinates for affine transforms, camera projection, and a simple scene renderer
0. Overview¶
Problem Statement¶
Computer graphics, robotics, and 3D data processing all require the same fundamental operation: describing positions and orientations in 3D space and transforming them via matrix multiplication.
The key insight: a homogeneous matrix can encode rotation, scaling, and translation in a single matrix multiply — making compositions of transformations trivial. The same mathematics governs a robot’s joint transforms, a camera’s view matrix, and a game engine’s scene graph.
Concepts Used¶
3D rotation matrices: Rx, Ry, Rz (extends ch166)
Composition of transformations via matrix multiplication (ch154)
Homogeneous coordinates: lifting for affine maps
Perspective projection: a rank-1 update to the transform pipeline
SVD as a decomposition of general 3D deformations (ch173)
Expected Output¶
3D rotation matrices: Rx, Ry, Rz and their composition
Homogeneous transform pipeline: translation + rotation + scaling in one matrix
Perspective projection: 3D → 2D
Scene rendering: a 3D wireframe cube under user-specified transforms
Gimbal lock demonstration — the failure mode of Euler angles
1. Setup¶
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
plt.style.use('seaborn-v0_8-whitegrid')
# ---------------------------------------------------------------
# Reference geometry: a unit cube centered at origin,
# a coordinate frame (axis arrows), and a simple 3D mesh.
# ---------------------------------------------------------------
def cube_vertices():
"""
8 vertices of a unit cube centered at origin.
Returns: shape (3, 8), each column is a vertex [x, y, z].
"""
return np.array([
[-1,-1,-1], [-1,-1, 1], [-1, 1,-1], [-1, 1, 1],
[ 1,-1,-1], [ 1,-1, 1], [ 1, 1,-1], [ 1, 1, 1]
]).T # shape (3, 8)
CUBE_VERTICES = cube_vertices()
# Cube edges: pairs of vertex indices
CUBE_EDGES = [
(0,1),(0,2),(0,4),(1,3),(1,5),(2,3),(2,6),(3,7),
(4,5),(4,6),(5,7),(6,7)
]
# Cube faces (for filled rendering)
CUBE_FACES = [
[0,1,3,2], [4,5,7,6], # left/right
[0,1,5,4], [2,3,7,6], # bottom/top
[0,2,6,4], [1,3,7,5], # front/back
]
print(f"Cube: {CUBE_VERTICES.shape[1]} vertices, {len(CUBE_EDGES)} edges, {len(CUBE_FACES)} faces")Cube: 8 vertices, 12 edges, 6 faces
2. Stage 1 — 3D Rotation Matrices¶
In 2D, there is only one rotation axis (the z-axis out of the plane). In 3D, we can rotate about any axis. The three elementary rotations:
Each is orthogonal (, ).
# --- Stage 1: 3D Rotation Matrices ---
def Rx(theta):
"""Rotation about x-axis by angle theta (radians)."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[1, 0, 0],
[0, c, -s],
[0, s, c]])
def Ry(theta):
"""Rotation about y-axis by angle theta (radians)."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[ c, 0, s],
[ 0, 1, 0],
[-s, 0, c]])
def Rz(theta):
"""Rotation about z-axis by angle theta (radians)."""
c, s = np.cos(theta), np.sin(theta)
return np.array([[c, -s, 0],
[s, c, 0],
[0, 0, 1]])
# Verify orthogonality
for name, R_fn in [('Rx', Rx), ('Ry', Ry), ('Rz', Rz)]:
R = R_fn(np.pi / 3)
err_ortho = np.linalg.norm(R.T @ R - np.eye(3))
det_val = np.linalg.det(R)
print(f"{name}(60°): ||R^T R - I|| = {err_ortho:.2e}, det = {det_val:.6f}")
# --- Rotation composition is not commutative ---
ALPHA = np.pi / 4 # 45° x-rotation
BETA = np.pi / 3 # 60° y-rotation
R1 = Rx(ALPHA) @ Ry(BETA) # x first, then y
R2 = Ry(BETA) @ Rx(ALPHA) # y first, then x
print(f"\nRx(45°) @ Ry(60°):\n{np.round(R1, 4)}")
print(f"\nRy(60°) @ Rx(45°):\n{np.round(R2, 4)}")
print(f"\nAre they equal? {np.allclose(R1, R2)}")
print(f"Max difference: {np.abs(R1 - R2).max():.4f}")Rx(60°): ||R^T R - I|| = 2.10e-17, det = 1.000000
Ry(60°): ||R^T R - I|| = 2.10e-17, det = 1.000000
Rz(60°): ||R^T R - I|| = 2.10e-17, det = 1.000000
Rx(45°) @ Ry(60°):
[[ 0.5 0. 0.866 ]
[ 0.6124 0.7071 -0.3536]
[-0.6124 0.7071 0.3536]]
Ry(60°) @ Rx(45°):
[[ 0.5 0.6124 0.6124]
[ 0. 0.7071 -0.7071]
[-0.866 0.3536 0.3536]]
Are they equal? False
Max difference: 0.6124
# --- Visualize cube under various rotations ---
def draw_cube(ax, vertices_3d, title='', color='steelblue', alpha=0.15):
"""
Draw a 3D wireframe cube.
Args:
ax: matplotlib 3D axes
vertices_3d: shape (3, 8)
title: subplot title
"""
# Draw edges
for i, j in CUBE_EDGES:
xs = [vertices_3d[0, i], vertices_3d[0, j]]
ys = [vertices_3d[1, i], vertices_3d[1, j]]
zs = [vertices_3d[2, i], vertices_3d[2, j]]
ax.plot(xs, ys, zs, color=color, lw=1.5, alpha=0.8)
# Draw faces
face_verts = [[vertices_3d[:, idx].tolist() for idx in face]
for face in CUBE_FACES]
poly = Poly3DCollection(face_verts, alpha=alpha,
facecolor=color, edgecolor='none')
ax.add_collection3d(poly)
# Draw coordinate axes (for the transformed frame)
origin = np.zeros(3)
for axis, col in [(np.array([1.5,0,0]),'red'),
(np.array([0,1.5,0]),'green'),
(np.array([0,0,1.5]),'blue')]:
ax.quiver(*origin, *axis, color=col, arrow_length_ratio=0.2, lw=2)
ax.set_xlim(-2, 2)
ax.set_ylim(-2, 2)
ax.set_zlim(-2, 2)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
ax.set_title(title, fontsize=9)
rotations = [
(np.eye(3), 'Identity'),
(Rx(np.pi/4), 'Rx(45°)'),
(Ry(np.pi/3), 'Ry(60°)'),
(Rz(np.pi/6), 'Rz(30°)'),
(Rx(np.pi/4)@Ry(np.pi/4),'Rx(45°)@Ry(45°)'),
(Ry(np.pi/4)@Rx(np.pi/4),'Ry(45°)@Rx(45°)'),
]
fig = plt.figure(figsize=(18, 8))
colors = plt.cm.tab10(np.arange(len(rotations)))
for i, (R, name) in enumerate(rotations):
ax = fig.add_subplot(2, 3, i+1, projection='3d')
verts_t = R @ CUBE_VERTICES
draw_cube(ax, CUBE_VERTICES, title='', color='lightgray', alpha=0.05)
draw_cube(ax, verts_t, title=name, color=colors[i], alpha=0.2)
plt.suptitle('3D Rotation Matrices — Cube Transformations\n(gray=original, colored=transformed)',
fontsize=12)
plt.tight_layout()
plt.show()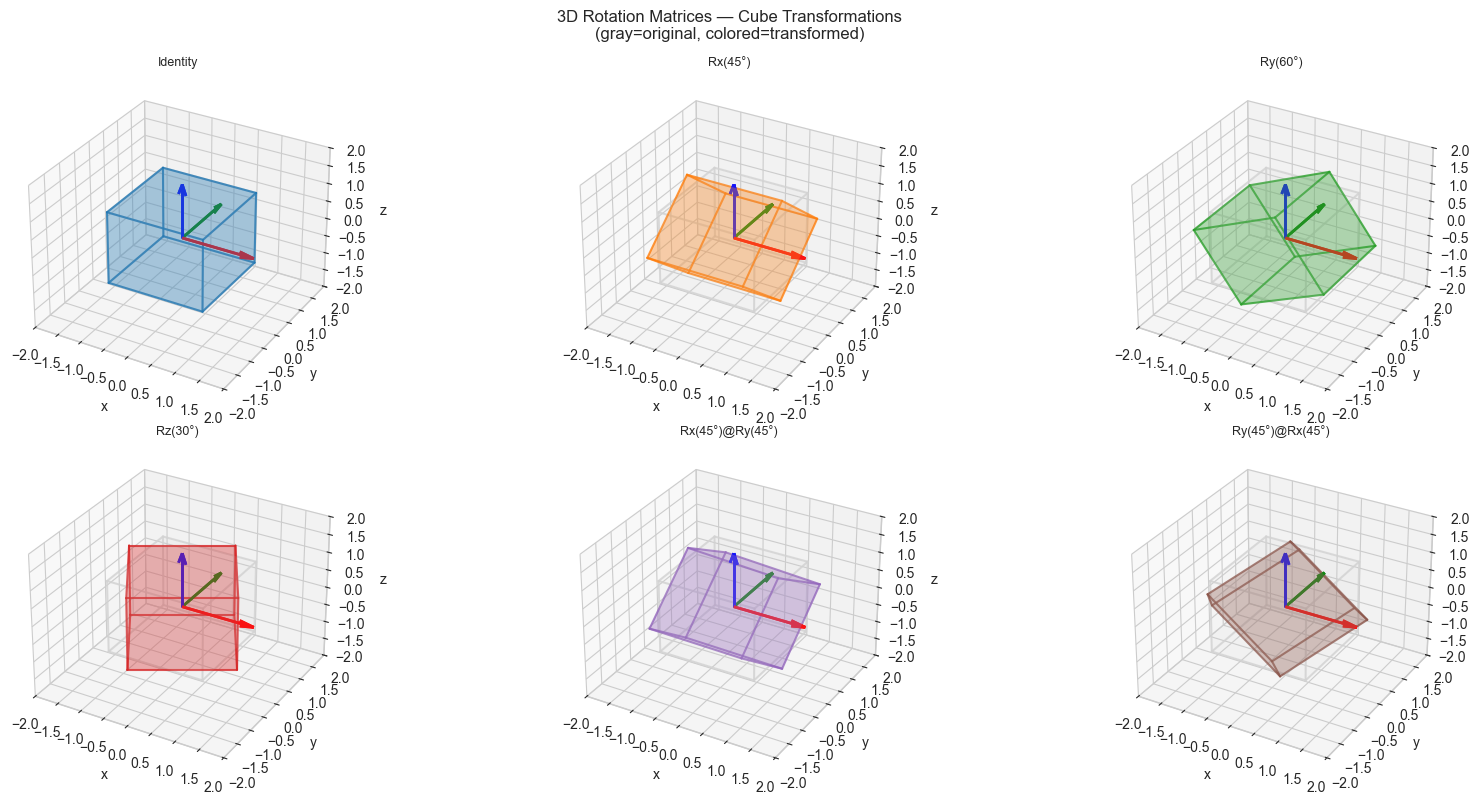
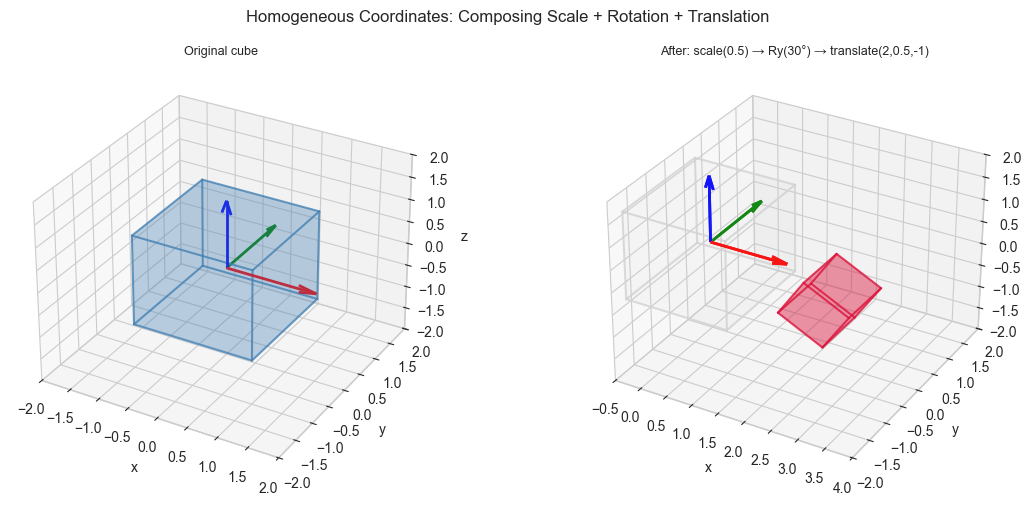
3. Stage 2 — Homogeneous Coordinates and Affine Transforms¶
Pure rotation matrices cannot represent translation () as a matrix multiplication — translation is affine, not linear.
The fix: lift points to 4D by appending a 1: .
Then translation, rotation, and scaling all fit into a matrix:
Composing transforms is just matrix multiplication: .
# --- Stage 2: Homogeneous Transform Pipeline ---
def make_transform(R=None, t=None, s=None):
"""
Build a 4x4 homogeneous transformation matrix.
T = [[s*R, t],
[0, 1]]
Args:
R: 3x3 rotation matrix (default: identity)
t: translation vector, shape (3,) (default: zero)
s: uniform scale factor (default: 1)
Returns:
T: 4x4 homogeneous matrix
"""
R = np.eye(3) if R is None else R
t = np.zeros(3) if t is None else t
s = 1.0 if s is None else s
T = np.eye(4)
T[:3, :3] = s * R
T[:3, 3] = t
return T
def apply_homogeneous(T, pts_3d):
"""
Apply a 4x4 homogeneous transform to 3D points.
Args:
T: 4x4 homogeneous matrix
pts_3d: 3D points, shape (3, N)
Returns:
Transformed 3D points, shape (3, N)
"""
N = pts_3d.shape[1]
pts_h = np.vstack([pts_3d, np.ones((1, N))]) # (4, N)
pts_t = T @ pts_h # (4, N)
return pts_t[:3] / pts_t[3] # dehomogenize
# Build a complex transform: scale → rotate → translate
T_scale = make_transform(s=0.5)
T_rotate = make_transform(R=Ry(np.pi/6))
T_trans = make_transform(t=np.array([2.0, 0.5, -1.0]))
# Compose: scale first, then rotate, then translate
# Note: apply right to left — T_trans @ T_rotate @ T_scale
T_composed = T_trans @ T_rotate @ T_scale
print("Composed transform (scale→rotate→translate):")
print(np.round(T_composed, 4))
# Apply to cube
CUBE_T = apply_homogeneous(T_composed, CUBE_VERTICES)
fig = plt.figure(figsize=(12, 5))
ax1 = fig.add_subplot(121, projection='3d')
draw_cube(ax1, CUBE_VERTICES, title='Original cube', color='steelblue', alpha=0.2)
ax2 = fig.add_subplot(122, projection='3d')
draw_cube(ax2, CUBE_VERTICES, title='', color='lightgray', alpha=0.05)
draw_cube(ax2, CUBE_T, title='After: scale(0.5) → Ry(30°) → translate(2,0.5,-1)',
color='crimson', alpha=0.25)
ax2.set_xlim(-0.5, 4)
ax2.set_ylim(-2, 2)
ax2.set_zlim(-2, 2)
plt.suptitle('Homogeneous Coordinates: Composing Scale + Rotation + Translation', fontsize=12)
plt.tight_layout()
plt.show()
# Verify: the inverse transform should recover the original
T_inv = np.linalg.inv(T_composed)
CUBE_rec = apply_homogeneous(T_inv, CUBE_T)
print(f"\nRoundtrip error: {np.abs(CUBE_rec - CUBE_VERTICES).max():.2e}")Composed transform (scale→rotate→translate):
[[ 0.433 0. 0.25 2. ]
[ 0. 0.5 0. 0.5 ]
[-0.25 0. 0.433 -1. ]
[ 0. 0. 0. 1. ]]
Roundtrip error: 4.44e-16
4. Stage 3 — Perspective Projection: 3D to 2D¶
# --- Stage 3: Perspective Projection ---
#
# A pinhole camera at the origin looks down the +z axis.
# A 3D point [X, Y, Z] projects to image coordinates:
# x_img = f * X / Z
# y_img = f * Y / Z
# where f is the focal length.
#
# In homogeneous form, this is a 3x4 matrix (projection matrix P):
# [f 0 0 0]
# P = [0 f 0 0]
# [0 0 1 0]
#
# After multiplying, divide by the third homogeneous coordinate.
def perspective_project(pts_3d, focal_length=2.0):
"""
Project 3D points onto a 2D image plane using perspective projection.
Args:
pts_3d: 3D points, shape (3, N)
focal_length: focal length parameter f
Returns:
pts_2d: 2D image coordinates, shape (2, N)
"""
f = focal_length
P = np.array([[f, 0, 0, 0],
[0, f, 0, 0],
[0, 0, 1, 0]])
N = pts_3d.shape[1]
pts_h = np.vstack([pts_3d, np.ones((1, N))]) # (4, N)
img_h = P @ pts_h # (3, N)
pts_2d = img_h[:2] / img_h[2] # divide by depth
return pts_2d
def draw_cube_2d(ax, pts_2d, title='', color='steelblue'):
"""Draw cube wireframe from 2D projected vertices."""
for i, j in CUBE_EDGES:
ax.plot([pts_2d[0, i], pts_2d[0, j]],
[pts_2d[1, i], pts_2d[1, j]],
color=color, lw=1.5)
ax.scatter(*pts_2d, s=20, color=color, zorder=5)
ax.set_aspect('equal')
ax.set_title(title, fontsize=10)
ax.set_xlabel('x (image)')
ax.set_ylabel('y (image)')
# Place cube 5 units in front of camera, then rotate it
CUBE_WORLD = CUBE_VERTICES.copy().astype(float)
CUBE_WORLD[2] += 5.0 # translate cube along z (away from camera)
# Try different viewing angles
view_angles = [
(np.eye(3), 'Frontal view'),
(Ry(np.pi/6), 'Ry(30°)'),
(Ry(np.pi/4), 'Ry(45°)'),
(Rx(np.pi/6) @ Ry(np.pi/4), 'Rx(30°) @ Ry(45°)'),
]
fig, axes = plt.subplots(1, 4, figsize=(16, 4))
colors = plt.cm.tab10(np.arange(4))
for ax, (R, title), col in zip(axes, view_angles, colors):
# Rotate the cube (or equivalently, rotate the camera)
CUBE_ROT = R @ CUBE_WORLD
CUBE_2D = perspective_project(CUBE_ROT, focal_length=2.0)
draw_cube_2d(ax, CUBE_2D, title=title, color=col)
ax.set_xlim(-1.5, 1.5)
ax.set_ylim(-1.5, 1.5)
ax.axhline(0, color='gray', lw=0.5)
ax.axvline(0, color='gray', lw=0.5)
plt.suptitle('Perspective Projection: 3D Cube → 2D Image', fontsize=12)
plt.tight_layout()
plt.show()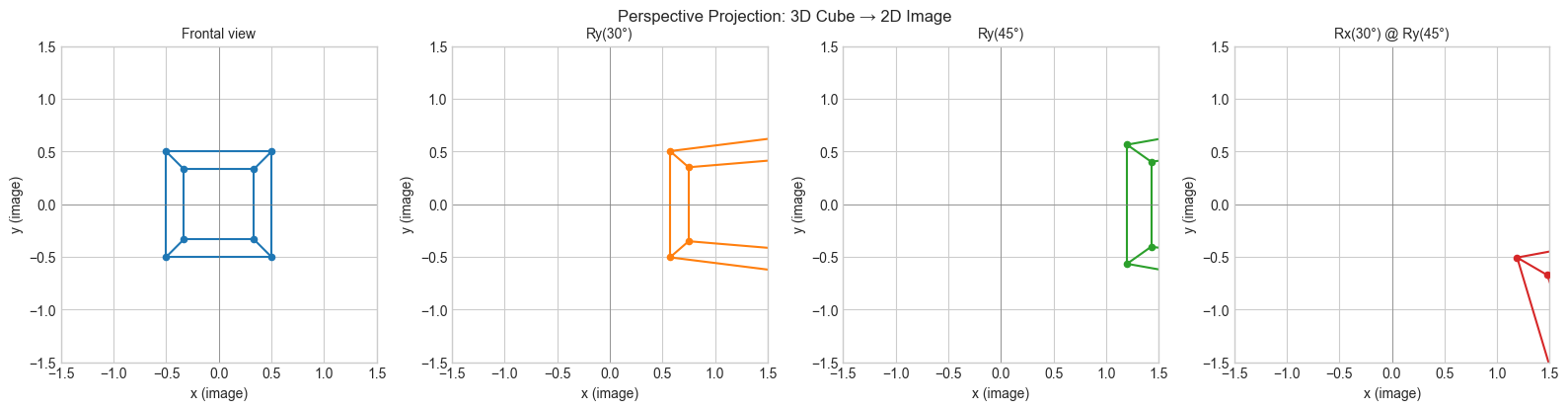
5. Stage 4 — Gimbal Lock: The Failure Mode of Euler Angles¶
# --- Stage 4: Gimbal Lock ---
#
# Euler angles: represent any rotation as three sequential single-axis rotations.
# Problem: when the middle rotation is +/-90 degrees, the first and third rotations
# collapse to the same axis — one degree of freedom is lost.
# This is "gimbal lock" — famous from the Apollo guidance computer.
#
# Hypothesis: rotating with Ry(90°) causes the x and z rotations to become equivalent.
def euler_to_matrix(alpha, beta, gamma):
"""
Compose Euler angles (ZYX convention): Rz(alpha) @ Ry(beta) @ Rx(gamma)
Args:
alpha, beta, gamma: rotation angles in radians
Returns:
Combined 3x3 rotation matrix
"""
return Rz(alpha) @ Ry(beta) @ Rx(gamma)
# Demonstrate gimbal lock: fix beta = pi/2
BETA_GIMBAL = np.pi / 2 # 90 degrees — the critical angle
fig, axes = plt.subplots(2, 4, figsize=(16, 8))
# Row 0: normal rotation (beta = 45°)
# Row 1: gimbal lock (beta = 90°)
alpha_vals = [0, np.pi/6, np.pi/3, np.pi/2]
betas = [np.pi/4, BETA_GIMBAL]
for row, beta_test in enumerate(betas):
for col, alpha in enumerate(alpha_vals):
R_euler = euler_to_matrix(alpha=alpha, beta=beta_test, gamma=0)
CUBE_E = R_euler @ CUBE_VERTICES
ax = axes[row, col]
CUBE_2D = perspective_project(CUBE_E + np.array([[0],[0],[5]]), focal_length=2.0)
draw_cube_2d(ax, CUBE_2D,
title=f'β={np.degrees(beta_test):.0f}° α={np.degrees(alpha):.0f}°',
color='steelblue' if row==0 else 'crimson')
ax.set_xlim(-1.5, 1.5)
ax.set_ylim(-1.5, 1.5)
axes[0, 0].set_title(f'β=45° (no gimbal lock)\nα={np.degrees(alpha_vals[0]):.0f}°', fontsize=9)
plt.suptitle('Gimbal Lock: When β=90°, varying α has the same effect as varying γ\n'
'(top: normal; bottom: locked — rotation is constrained to one plane)',
fontsize=11)
plt.tight_layout()
plt.show()
# Numerical confirmation: at beta=90, Rz(alpha) @ Ry(90) @ Rx(gamma)
# only depends on (alpha - gamma)
print("\nGimbal lock numerical check:")
print("At β=90°, R(α=30°, β=90°, γ=0°) should equal R(α=0°, β=90°, γ=-30°):")
R1 = euler_to_matrix(np.pi/6, np.pi/2, 0)
R2 = euler_to_matrix(0, np.pi/2, -np.pi/6)
print(f"Max difference: {np.abs(R1 - R2).max():.2e} (should be ~0)")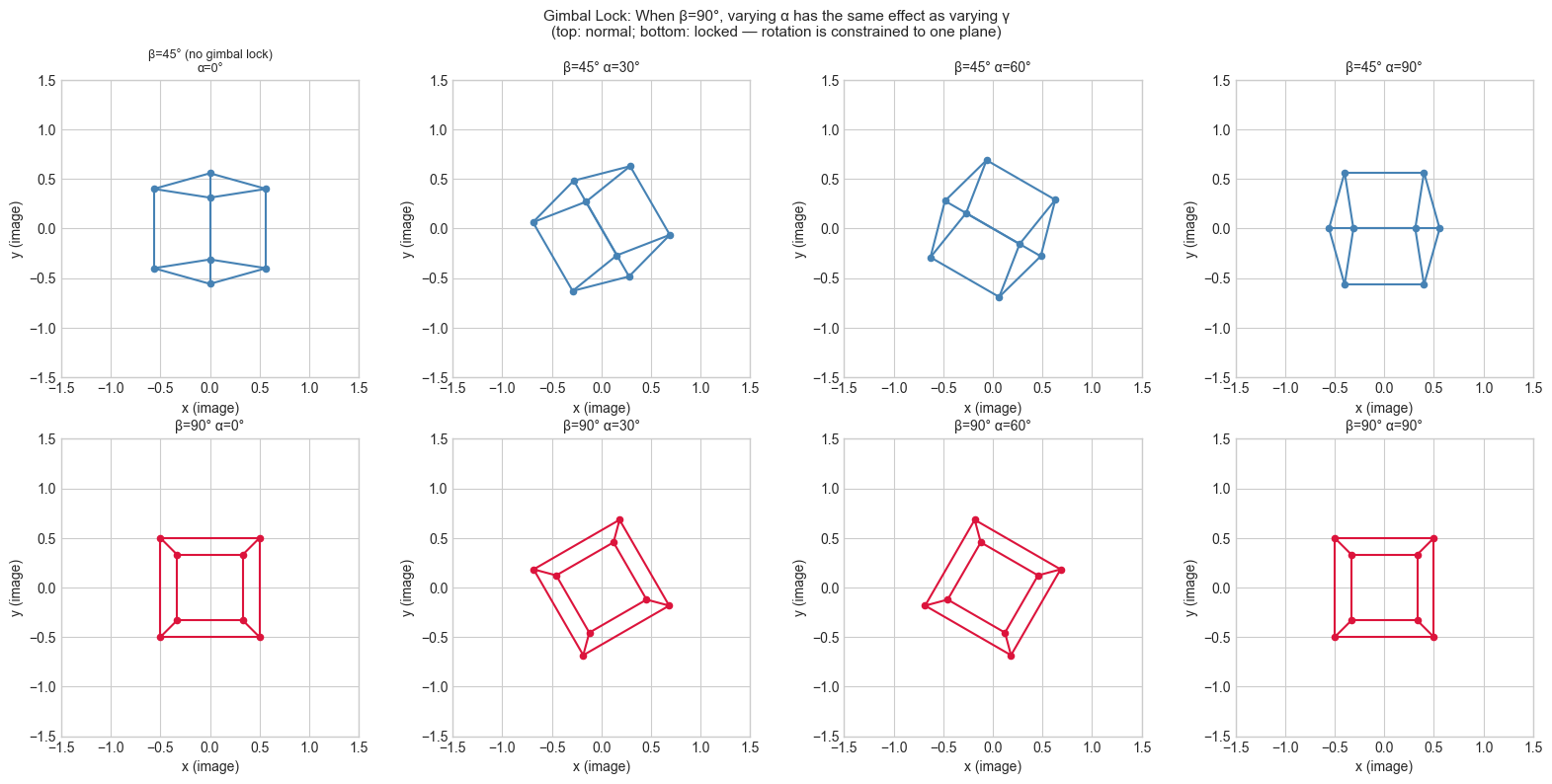
Gimbal lock numerical check:
At β=90°, R(α=30°, β=90°, γ=0°) should equal R(α=0°, β=90°, γ=-30°):
Max difference: 3.06e-17 (should be ~0)
6. Results & Reflection¶
What Was Built¶
A complete 3D transformation toolkit:
Elementary rotation matrices Rx, Ry, Rz — all orthogonal with determinant 1
Homogeneous coordinates: a matrix encoding rotation + scale + translation in one multiply
Perspective projection: the projection matrix that maps 3D world coordinates to 2D image coordinates
A 3D wireframe cube rendered from multiple viewpoints
Gimbal lock: the algebraic reason why Euler angles lose a degree of freedom at
Core Insights¶
| Concept | What it reveals |
|---|---|
| Orthogonality of R | Rotations preserve lengths and angles: |
| Homogeneous coordinates | Translation is linear in augmented space — compose everything as matmuls |
| Perspective divide by Z | Closer objects appear larger — depth modulates the scale |
| Gimbal lock | Euler angles are not a smooth parameterization: quaternions solve this |
Extension Challenges¶
1. Quaternion rotation.
Quaternions with represent rotations without gimbal lock.
Implement quaternion multiplication and quaternion_to_matrix. Verify that quaternion
interpolation (slerp) produces smoother paths than Euler interpolation.
2. Full rendering pipeline. Extend the perspective projection to a complete view frustum: model matrix → view matrix → projection matrix → viewport transform. Render a more complex object (tetrahedron, Stanford bunny point cloud) and implement backface culling using dot products with surface normals.
3. Camera calibration basics. Given a set of known 3D points and their 2D projections, recover the camera intrinsic matrix and rotation/translation. This is the Direct Linear Transform (DLT) algorithm — it is a least-squares problem (ch182) with an SVD solution (ch173).
Summary & Connections¶
3D rotation matrices are orthogonal (, ). They form the special orthogonal group SO(3). Composition by matrix multiplication is not commutative (ch154).
Homogeneous coordinates embed so that affine maps (translation + linear) become linear in the augmented space. This unifies the entire transform pipeline into a single matmul (ch154, ch164).
Perspective projection is a linear map in homogeneous coordinates followed by a division by depth. The resulting non-linearity in Cartesian coordinates gives the visual effect of foreshortening.
Gimbal lock is not a software bug — it is an intrinsic singularity of the Euler angle parameterization. Quaternions and rotation matrices do not have this problem.
This project reappears in:
ch119 (Geometry in Game Development) — applies this exact pipeline in the context of game engines and scene graphs.
ch278 (Feature Engineering) — 3D pose features for human motion data use the same rotation matrix representation.
ch187 (Project: Face Recognition PCA) — face images are 2D projections of 3D objects; understanding this projection helps interpret what PCA captures.