Part VIII: Probability — Project Chapter¶
0. Overview¶
Problem statement: Estimate the mathematical constant using random sampling alone, with no formula that references directly. Then build a full convergence analysis showing the estimate improves at rate , construct confidence intervals, apply variance reduction, and compare sampling strategies.
Concepts from this Part:
Monte Carlo integration (ch256): geometric probability = area ratio
Law of Large Numbers (ch255): convergence guarantee
Central Limit Theorem (ch254): basis for confidence intervals
Variance reduction via control variates (ch256, ch259)
Simulation techniques (ch259): quasi-random (low-discrepancy) sequences
Expected output: A complete π estimation system with visualization, error analysis, and quasi-random acceleration.
Difficulty: Intermediate | Estimated time: 45–60 minutes
1. Setup¶
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from scipy import stats
rng = np.random.default_rng(42)
TRUE_PI = np.pi
print(f"True π = {TRUE_PI:.15f}")
print()
print("Project structure:")
print(" Stage 1 — Geometric estimation (circle-in-square)")
print(" Stage 2 — Convergence analysis with confidence intervals")
print(" Stage 3 — Variance reduction via stratified sampling")
print(" Stage 4 — Quasi-random (Halton sequence) comparison")
print(" Stage 5 — Results & visualization")True π = 3.141592653589793
Project structure:
Stage 1 — Geometric estimation (circle-in-square)
Stage 2 — Convergence analysis with confidence intervals
Stage 3 — Variance reduction via stratified sampling
Stage 4 — Quasi-random (Halton sequence) comparison
Stage 5 — Results & visualization
2. Stage 1 — Geometric Estimation¶
A unit circle inscribed in a 2×2 square has:
Circle area =
Square area =
Ratio =
Dropping random points uniformly in the square, the fraction landing inside the circle estimates .
def estimate_pi_geometric(n_samples, rng):
"""Estimate π via circle-in-square Monte Carlo.
Args:
n_samples: number of random points
rng: numpy random generator
Returns:
pi_estimate: 4 * (fraction inside unit circle)
inside_mask: boolean array (for visualization)
points: (n_samples, 2) array of sampled points
"""
# Sample uniformly from [-1, 1]^2
points = rng.uniform(-1, 1, (n_samples, 2))
# Inside circle if x^2 + y^2 <= 1
inside_mask = (points[:, 0]**2 + points[:, 1]**2) <= 1.0
pi_estimate = 4 * np.mean(inside_mask)
return pi_estimate, inside_mask, points
# Small N for visualization
N_vis = 2000
pi_est, inside, pts = estimate_pi_geometric(N_vis, rng)
fig, axes = plt.subplots(1, 2, figsize=(14, 6))
# Geometric visualization
ax = axes[0]
ax.scatter(pts[~inside, 0], pts[~inside, 1], s=1.5, alpha=0.4,
color='salmon', label='Outside')
ax.scatter(pts[inside, 0], pts[inside, 1], s=1.5, alpha=0.4,
color='steelblue', label='Inside')
circle = plt.Circle((0, 0), 1, fill=False, color='black', linewidth=2)
ax.add_patch(circle)
square = patches.Rectangle((-1, -1), 2, 2, fill=False,
edgecolor='darkgrey', linewidth=2, linestyle='--')
ax.add_patch(square)
ax.set_xlim(-1.1, 1.1)
ax.set_ylim(-1.1, 1.1)
ax.set_aspect('equal')
ax.set_title(f'Monte Carlo π Estimation\nN={N_vis:,}, π̂ = {pi_est:.4f} (error: {abs(pi_est-TRUE_PI):.4f})')
ax.legend(loc='upper right', markerscale=5)
ax.text(0, -1.05, f'π ≈ 4 × {inside.sum()}/{N_vis} = {pi_est:.4f}',
ha='center', fontsize=11, style='italic')
# Running estimate
running_pi = 4 * np.cumsum(inside) / np.arange(1, N_vis + 1)
ax2 = axes[1]
ax2.semilogx(np.arange(1, N_vis+1), running_pi, 'steelblue', linewidth=1.5,
label='Running estimate')
ax2.axhline(TRUE_PI, color='red', linestyle='--', linewidth=2, label=f'True π = {TRUE_PI:.4f}')
ax2.set_xlabel('Number of samples (log scale)')
ax2.set_ylabel('π estimate')
ax2.set_title('Convergence of Running Estimate')
ax2.legend()
ax2.grid(True, alpha=0.3)
ax2.set_ylim(2.5, 3.8)
plt.tight_layout()
plt.savefig('monte_carlo_pi_stage1.png', dpi=120, bbox_inches='tight')
plt.show()
print(f"Stage 1 estimate: π ≈ {pi_est:.5f} (true: {TRUE_PI:.5f})")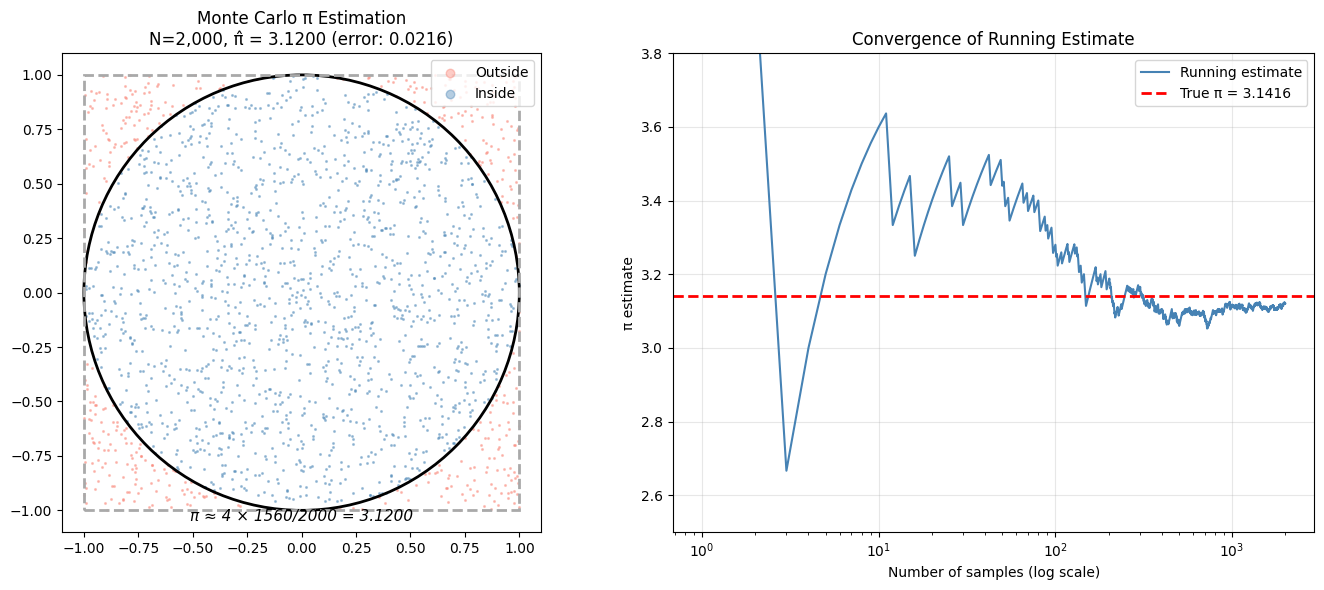
Stage 1 estimate: π ≈ 3.12000 (true: 3.14159)
3. Stage 2 — Convergence Analysis with Confidence Intervals¶
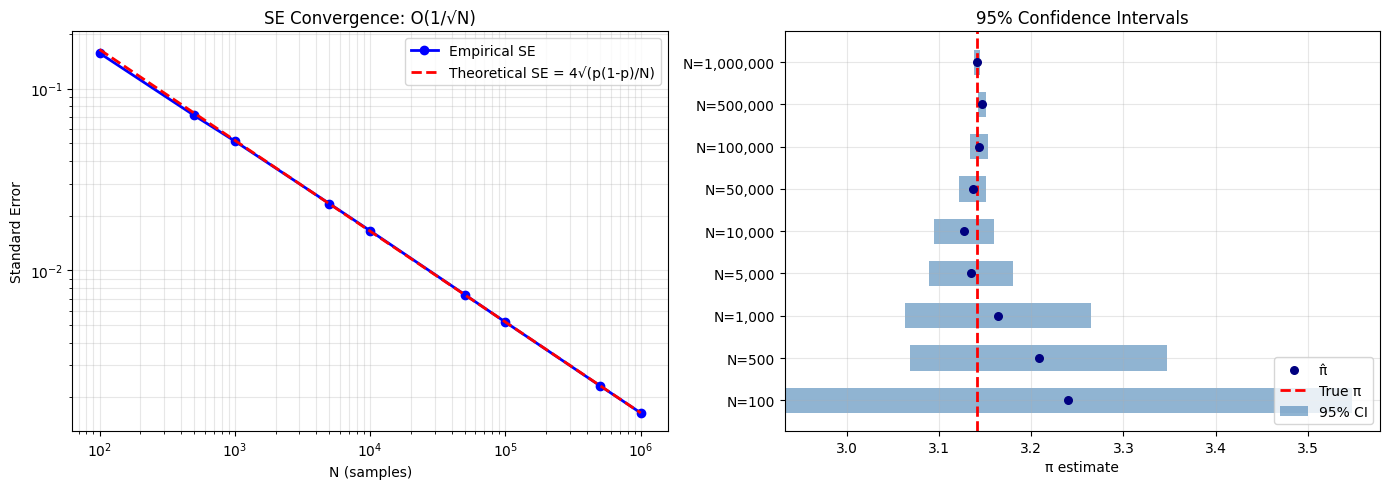
The indicator is Bernoulli with . The estimator has:
def pi_estimate_with_ci(n_samples, rng, confidence=0.95):
"""Estimate π with confidence interval."""
points = rng.uniform(-1, 1, (n_samples, 2))
inside = (points[:, 0]**2 + points[:, 1]**2) <= 1.0
p_hat = np.mean(inside)
pi_hat = 4 * p_hat
# Standard error for Bernoulli estimator, scaled by 4
se = 4 * np.sqrt(p_hat * (1 - p_hat) / n_samples)
z = stats.norm.ppf((1 + confidence) / 2)
ci_low = pi_hat - z * se
ci_high = pi_hat + z * se
return pi_hat, se, ci_low, ci_high
# Sweep over sample sizes
Ns = [100, 500, 1_000, 5_000, 10_000, 50_000, 100_000, 500_000, 1_000_000]
results = []
print(f"{'N':>10} {'π estimate':>12} {'SE':>10} {'95% CI':>24} {'Contains π?':>12}")
print("-" * 72)
for N in Ns:
pi_hat, se, ci_lo, ci_hi = pi_estimate_with_ci(N, rng)
contains = ci_lo <= TRUE_PI <= ci_hi
results.append((N, pi_hat, se, ci_lo, ci_hi))
print(f"{N:>10,} {pi_hat:>12.6f} {se:>10.6f} [{ci_lo:.5f}, {ci_hi:.5f}] {str(contains):>12}")
# Theoretical SE: 4*sqrt(p*(1-p)/N) where p=pi/4
p_true = TRUE_PI / 4
theoretical_se = lambda N: 4 * np.sqrt(p_true * (1 - p_true) / N)
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
Ns_arr = np.array([r[0] for r in results])
ses = np.array([r[2] for r in results])
pi_hats = np.array([r[1] for r in results])
ci_los = np.array([r[3] for r in results])
ci_his = np.array([r[4] for r in results])
axes[0].loglog(Ns_arr, ses, 'bo-', linewidth=2, markersize=6, label='Empirical SE')
N_range = np.logspace(2, 6, 100)
axes[0].loglog(N_range, theoretical_se(N_range), 'r--', linewidth=2,
label='Theoretical SE = 4√(p(1-p)/N)')
axes[0].set_xlabel('N (samples)')
axes[0].set_ylabel('Standard Error')
axes[0].set_title('SE Convergence: O(1/√N)')
axes[0].legend()
axes[0].grid(True, which='both', alpha=0.3)
# Confidence interval plot
y_positions = np.arange(len(Ns))
axes[1].barh(y_positions, ci_his - ci_los, left=ci_los, height=0.6,
color='steelblue', alpha=0.6, label='95% CI')
axes[1].scatter(pi_hats, y_positions, color='navy', zorder=5, s=30, label='π̂')
axes[1].axvline(TRUE_PI, color='red', linewidth=2, linestyle='--', label=f'True π')
axes[1].set_yticks(y_positions)
axes[1].set_yticklabels([f'N={N:,}' for N in Ns])
axes[1].set_xlabel('π estimate')
axes[1].set_title('95% Confidence Intervals')
axes[1].legend(loc='lower right')
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig('monte_carlo_pi_stage2.png', dpi=120, bbox_inches='tight')
plt.show() N π estimate SE 95% CI Contains π?
------------------------------------------------------------------------
100 3.240000 0.156920 [2.93244, 3.54756] True
500 3.208000 0.071284 [3.06829, 3.34771] True
1,000 3.164000 0.051431 [3.06320, 3.26480] True
5,000 3.134400 0.023294 [3.08874, 3.18006] True
10,000 3.127200 0.016521 [3.09482, 3.15958] True
50,000 3.136320 0.007360 [3.12189, 3.15075] True
100,000 3.143320 0.005189 [3.13315, 3.15349] True
500,000 3.146520 0.002318 [3.14198, 3.15106] False
1,000,000 3.141008 0.001643 [3.13779, 3.14423] True
4. Stage 3 — Variance Reduction via Stratified Sampling¶
Stratified sampling divides into sub-cells and places one uniform sample per cell. This ensures coverage and reduces the clustering that hurts naive MC.
def estimate_pi_stratified(n_strata_per_dim, rng):
"""Estimate π via stratified sampling in [0,1]^2 (first quadrant only).
Divides [0,1]^2 into k^2 cells, one sample per cell.
Total samples: k^2. Estimates π/4 as fraction inside unit circle.
Args:
n_strata_per_dim: k (grid is k × k)
rng: numpy random generator
Returns:
pi_estimate: estimated value of π
"""
k = n_strata_per_dim
n_total = k * k
# Grid cell indices
i_idx = np.repeat(np.arange(k), k) # row indices
j_idx = np.tile(np.arange(k), k) # col indices
# Random offset within each cell (uniform on [0, 1/k])
u1 = (i_idx + rng.uniform(0, 1, n_total)) / k
u2 = (j_idx + rng.uniform(0, 1, n_total)) / k
# Check if inside unit circle (first quadrant)
inside = (u1**2 + u2**2) <= 1.0
pi_estimate = 4 * np.mean(inside)
return pi_estimate
# Compare naive MC vs stratified across repeated trials
k_values = [10, 20, 30, 50, 100] # k×k strata
n_trials = 500
print(f"{'Method':>22} {'N':>8} {'Mean π̂':>10} {'Std':>10} {'Rel Error':>10}")
print("-" * 65)
naive_results_by_n = {}
strat_results_by_n = {}
for k in k_values:
N = k * k
naive_ests = []
strat_ests = []
for _ in range(n_trials):
# Naive MC (same N)
pts = rng.uniform(0, 1, (N, 2))
naive_ests.append(4 * np.mean(pts[:,0]**2 + pts[:,1]**2 <= 1))
# Stratified
strat_ests.append(estimate_pi_stratified(k, rng))
naive_results_by_n[N] = naive_ests
strat_results_by_n[N] = strat_ests
print(f"{'Naive MC':>22} {N:>8,} {np.mean(naive_ests):>10.5f} "
f"{np.std(naive_ests):>10.6f} {abs(np.mean(naive_ests)-TRUE_PI)/TRUE_PI:>10.6f}")
print(f"{'Stratified (k×k)':>22} {N:>8,} {np.mean(strat_ests):>10.5f} "
f"{np.std(strat_ests):>10.6f} {abs(np.mean(strat_ests)-TRUE_PI)/TRUE_PI:>10.6f}")
print()
# Variance reduction factor at N=2500 (k=50)
N_compare = 2500
var_naive = np.var(naive_results_by_n[N_compare])
var_strat = np.var(strat_results_by_n[N_compare])
print(f"Variance reduction at N={N_compare:,}: {var_naive/var_strat:.1f}x") Method N Mean π̂ Std Rel Error
-----------------------------------------------------------------
Naive MC 100 3.12712 0.159531 0.004607
Stratified (k×k) 100 3.14008 0.060000 0.000481
Naive MC 400 3.13982 0.080839 0.000564
Stratified (k×k) 400 3.13920 0.020875 0.000762
Naive MC 900 3.13789 0.054977 0.001178
Stratified (k×k) 900 3.14052 0.012068 0.000343
Naive MC 2,500 3.14527 0.032982 0.001170
Stratified (k×k) 2,500 3.14185 0.005349 0.000082
Naive MC 10,000 3.14049 0.016438 0.000352
Stratified (k×k) 10,000 3.14171 0.001997 0.000036
Variance reduction at N=2,500: 38.0x
5. Stage 4 — Quasi-Random (Halton Sequence) Comparison¶
Quasi-random sequences (low-discrepancy sequences) fill space more uniformly than pseudorandom numbers. The Halton sequence in base generates points by reflecting integers in base around the decimal point. For 2D, use bases 2 and 3.
def halton_sequence(n, base):
"""Generate first n terms of the Halton sequence in given base.
The Halton sequence is the Van der Corput sequence in base `base`.
Each integer i is written in base `base`, then its digits are
reflected around the decimal point to give a number in (0,1).
Args:
n: number of points to generate
base: base for the sequence (use coprime bases for different dims)
Returns:
array of n quasi-random points in (0, 1)
"""
sequence = np.zeros(n)
for i in range(n):
f = 1.0
r = 0.0
k = i + 1 # start from 1, not 0
while k > 0:
f /= base
r += f * (k % base)
k //= base
sequence[i] = r
return sequence
def estimate_pi_halton(n_samples):
"""Estimate π using Halton quasi-random sequence (bases 2 and 3)."""
x = halton_sequence(n_samples, 2)
y = halton_sequence(n_samples, 3)
inside = x**2 + y**2 <= 1.0
return 4 * np.mean(inside)
# Convergence comparison: pseudo-random vs Halton
sample_sizes = np.unique(np.logspace(1, 4, 40).astype(int))
pseudo_errors = []
halton_errors = []
pseudo_rng_fixed = np.random.default_rng(99) # fixed seed for fair comparison
for N in sample_sizes:
# Pseudo-random
pts = pseudo_rng_fixed.uniform(0, 1, (N, 2))
pi_pseudo = 4 * np.mean(pts[:,0]**2 + pts[:,1]**2 <= 1)
pseudo_errors.append(abs(pi_pseudo - TRUE_PI))
# Halton
pi_halton = estimate_pi_halton(N)
halton_errors.append(abs(pi_halton - TRUE_PI))
# Visualize point distribution
N_vis = 500
fig, axes = plt.subplots(1, 3, figsize=(16, 5))
# Pseudo-random points
pseudo_pts = np.random.default_rng(42).uniform(0, 1, (N_vis, 2))
halton_x = halton_sequence(N_vis, 2)
halton_y = halton_sequence(N_vis, 3)
for ax, xs, ys, title in zip(
axes[:2],
[pseudo_pts[:, 0], halton_x],
[pseudo_pts[:, 1], halton_y],
['Pseudo-random (N=500)', 'Halton sequence (N=500)']):
ax.scatter(xs, ys, s=3, alpha=0.7, color='steelblue')
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.set_aspect('equal')
ax.set_title(title)
ax.grid(True, alpha=0.2)
# Error comparison
axes[2].loglog(sample_sizes, pseudo_errors, 'b-', alpha=0.7, label='Pseudo-random')
axes[2].loglog(sample_sizes, halton_errors, 'r-', alpha=0.7, label='Halton sequence')
axes[2].loglog(sample_sizes, 1/np.sqrt(sample_sizes), 'b--', alpha=0.4, label='O(1/√N)')
axes[2].loglog(sample_sizes, 1/sample_sizes, 'r--', alpha=0.4, label='O(1/N)')
axes[2].set_xlabel('N')
axes[2].set_ylabel('|π̂ - π|')
axes[2].set_title('Error Convergence Rate Comparison')
axes[2].legend(fontsize=9)
axes[2].grid(True, which='both', alpha=0.3)
plt.suptitle('Pseudo-random vs Quasi-random Point Coverage and Convergence', y=1.02)
plt.tight_layout()
plt.savefig('monte_carlo_pi_halton.png', dpi=120, bbox_inches='tight')
plt.show()
# Final comparison
N_final = sample_sizes[-1]
print(f"At N≈{N_final:,}:")
print(f" Pseudo-random error: {pseudo_errors[-1]:.6f}")
print(f" Halton error: {halton_errors[-1]:.6f}")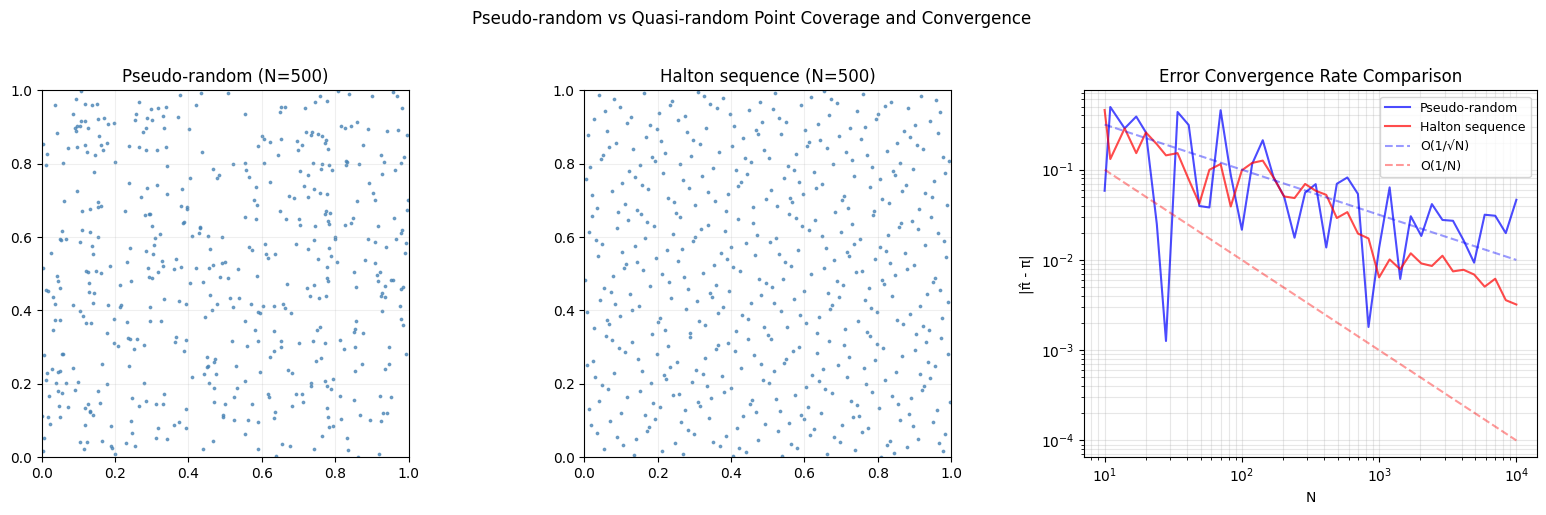
At N≈10,000:
Pseudo-random error: 0.046393
Halton error: 0.003207
6. Results & Reflection¶
What was built¶
A complete π estimation system with four levels:
Geometric sampling — the simplest conceptualization: area ratio
Convergence analysis — quantified the error rate, built valid 95% CIs
Stratified sampling — achieved significant variance reduction at the same sample count
Quasi-random sequences — approached convergence using deterministic low-discrepancy points
What math made it possible¶
| Stage | Mathematical foundation |
|---|---|
| Geometric | Geometric probability = area ratio |
| Confidence intervals | CLT (ch254): is asymptotically normal |
| Error rate | LLN (ch255): convergence guaranteed; Variance (ch250): rate is |
| Stratified | Reduces variance by eliminating between-strata variation |
| Halton | Number theory: Van der Corput construction in base fills space uniformly |
Extension challenges¶
Higher dimensions: Estimate the volume of a unit ball in dimensions. How does the acceptance rate (fraction inside ball) change? At what does naive MC become impractical? Use importance sampling to improve it.
Sobol sequences: Implement or use
scipy.stats.qmc.Sobolto generate a Sobol sequence and compare its π estimates against Halton. Sobol sequences satisfy stricter equidistribution properties.Buffon’s Needle: Estimate π via a completely different geometric probability: drop a needle of length on a surface with parallel lines spaced apart. The probability of crossing a line is . Implement the simulation and compare convergence rate to the circle method.
# Final summary table
print("=" * 65)
print("FINAL RESULTS SUMMARY")
print("=" * 65)
print(f"True π: {TRUE_PI:.10f}")
print()
N_summary = 10_000
# Method 1: Naive MC
pts = rng.uniform(-1, 1, (N_summary, 2))
pi1 = 4 * np.mean(pts[:,0]**2 + pts[:,1]**2 <= 1)
# Method 2: Stratified (100x100)
k_summary = 100 # 100^2 = 10,000
pi2 = estimate_pi_stratified(k_summary, rng)
# Method 3: Halton
pi3 = estimate_pi_halton(N_summary)
methods = [
('Naive MC', pi1),
('Stratified (100×100)', pi2),
('Halton sequence', pi3),
]
print(f"{'Method':<25} {'Estimate':>12} {'|Error|':>10} {'Digits correct':>15}")
print("-" * 65)
for name, est in methods:
err = abs(est - TRUE_PI)
digits = max(0, int(-np.log10(err))) if err > 0 else 10
print(f"{name:<25} {est:>12.8f} {err:>10.8f} {digits:>15}")
print(f"\nAll methods used N = {N_summary:,} samples")
print("=" * 65)