Prerequisites: ch160 (Systems of Linear Equations), ch192 (Rank/Nullity), ch194 (Condition Numbers), ch195 (Sparse Matrices) You will learn:
Why direct solvers fail at large scale
Jacobi, Gauss-Seidel, and Successive Over-Relaxation (SOR)
Conjugate Gradient and Krylov subspaces
Convergence analysis and preconditioning
When to use iterative vs. direct solvers Environment: Python 3.x, numpy, matplotlib
1. Concept¶
Gaussian elimination (ch161) costs operations and storage — infeasible for . Iterative methods start with an initial guess and refine it using only matrix-vector products, costing per iteration (ch195).
The price: convergence is not guaranteed, and speed depends strongly on the condition number (ch194). Well-chosen preconditioners can dramatically accelerate convergence.
Common misconception: iterative methods are approximate. In exact arithmetic, CG finds the exact solution in at most steps.
2. Intuition & Mental Models¶
Jacobi: update each component using values from the previous iteration — solve each equation independently, holding others fixed. Converges when the diagonal of dominates the off-diagonals.
Gauss-Seidel: use freshly updated values immediately. Each component sees more current information → faster convergence than Jacobi.
Conjugate Gradient (CG): optimal for symmetric positive definite (SPD) systems. At step , the solution lies in the Krylov subspace . CG minimizes the error over this subspace — it converges in at most steps, often far fewer.
3. Visualization¶
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
rng = np.random.default_rng(42)
def poisson_1d(n):
"""1D Poisson system: tridiagonal SPD matrix."""
return 2*np.eye(n) - np.diag(np.ones(n-1),1) - np.diag(np.ones(n-1),-1)
def jacobi(A, b, n_iters=300):
x = np.zeros(len(b))
D_inv = 1.0 / np.diag(A)
R = A - np.diag(np.diag(A))
errs = []
for _ in range(n_iters):
x = D_inv * (b - R @ x)
errs.append(np.linalg.norm(A @ x - b))
if errs[-1] < 1e-12: break
return x, errs
def conjugate_gradient(A, b, n_iters=None):
n = len(b)
if n_iters is None: n_iters = n
x = np.zeros(n)
r = b.copy()
p = r.copy()
errs = [np.linalg.norm(r)]
for _ in range(n_iters):
Ap = A @ p
alpha = np.dot(r, r) / (np.dot(p, Ap) + 1e-300)
x += alpha * p
r_new = r - alpha * Ap
beta = np.dot(r_new, r_new) / (np.dot(r, r) + 1e-300)
p = r_new + beta * p
r = r_new
errs.append(np.linalg.norm(r))
if errs[-1] < 1e-12: break
return x, errs
N = 40
A_p = poisson_1d(N)
b_p = np.ones(N)
_, errs_j = jacobi(A_p, b_p)
_, errs_cg = conjugate_gradient(A_p, b_p)
fig, ax = plt.subplots(figsize=(9, 4))
ax.semilogy(errs_j, color='steelblue', label='Jacobi')
ax.semilogy(errs_cg, color='crimson', label='Conjugate Gradient')
ax.set_xlabel('Iteration')
ax.set_ylabel('Residual ||Ax-b||')
ax.set_title('Convergence: Jacobi vs Conjugate Gradient (1D Poisson, n=40)')
ax.legend()
plt.tight_layout()
plt.show()
print('CG converges in O(sqrt(κ)) iterations; Jacobi in O(κ).')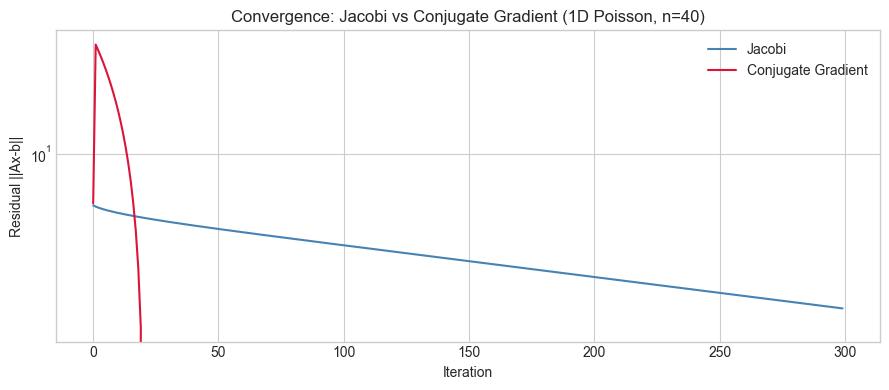
CG converges in O(sqrt(κ)) iterations; Jacobi in O(κ).
4. Mathematical Formulation¶
Jacobi: split :
Converges iff spectral radius .
CG iteration: search directions are -conjugate ( for ):
Convergence bound for CG:
Lower = faster convergence (ch194).
5. Python Implementation¶
def gauss_seidel(A, b, n_iters=200, omega=1.0):
"""
Gauss-Seidel (omega=1) or SOR (omega != 1).
omega > 1: over-relaxation (typically faster, optimal 1 < omega < 2)
"""
n = len(b)
x = np.zeros(n)
errs = []
for _ in range(n_iters):
for i in range(n):
s = b[i] - sum(A[i,j]*x[j] for j in range(n) if j != i)
x_gs = s / A[i, i]
x[i] = (1 - omega) * x[i] + omega * x_gs
errs.append(np.linalg.norm(A @ x - b))
if errs[-1] < 1e-12: break
return x, errs
fig, ax = plt.subplots(figsize=(9, 4))
for omega in [1.0, 1.3, 1.6, 1.85]:
_, errs = gauss_seidel(A_p, b_p, n_iters=150, omega=omega)
ax.semilogy(errs, label=f'SOR ω={omega}')
ax.set_xlabel('Iteration')
ax.set_ylabel('Residual')
ax.set_title('SOR Convergence vs Relaxation Parameter ω')
ax.legend(fontsize=8)
plt.tight_layout()
plt.show()
print('Optimal ω ≈ 1.6–1.9 for this system. Too large → diverges.')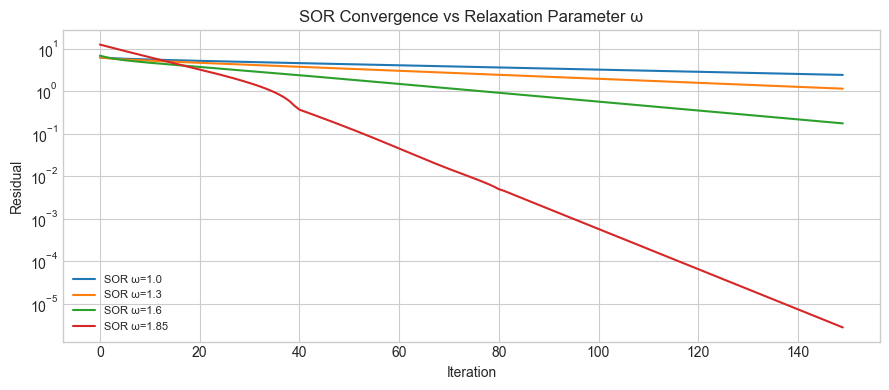
Optimal ω ≈ 1.6–1.9 for this system. Too large → diverges.
6. Experiments¶
# --- Experiment: CG convergence vs condition number ---
# Hypothesis: higher κ(A) → more CG iterations to reach tolerance.
# Try changing: KAPPA_LIST, N_EXP
KAPPA_LIST = [10, 50, 200, 1000] # <-- modify
N_EXP = 50
fig, ax = plt.subplots(figsize=(9, 4))
for kappa in KAPPA_LIST:
U_e, _ = np.linalg.qr(rng.normal(0,1,(N_EXP, N_EXP)))
s_e = np.geomspace(kappa, 1, N_EXP)
A_e = U_e @ np.diag(s_e) @ U_e.T
b_e = rng.normal(0,1,N_EXP)
_, errs = conjugate_gradient(A_e, b_e, n_iters=N_EXP)
ax.semilogy(errs, label=f'κ={kappa}')
ax.set_xlabel('CG Iteration')
ax.set_ylabel('Residual')
ax.set_title('CG Convergence vs Condition Number')
ax.legend(fontsize=8)
plt.tight_layout()
plt.show()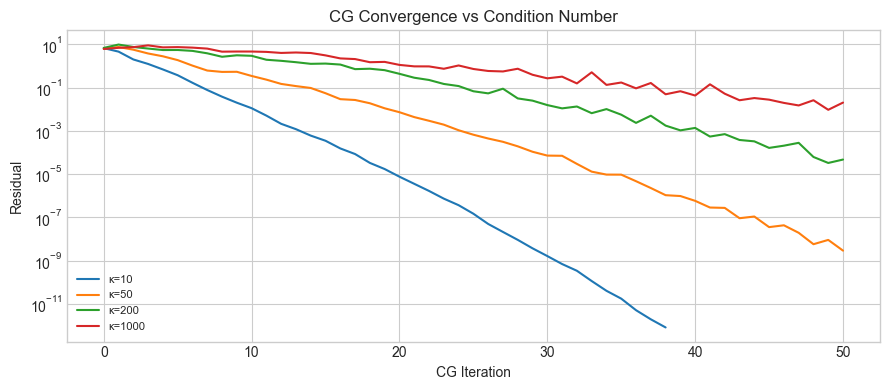
7. Exercises¶
Easy 1. Show that Jacobi for a diagonal converges in exactly 1 iteration. What is in this case?
Easy 2. Implement the residual stopping criterion: stop when ||Ax-b||/||b|| < tol. Count how many Jacobi iterations reach tol=1e-6 for the Poisson system of size .
Medium 1. Find a SPD matrix for which Jacobi diverges but Gauss-Seidel converges. Hint: look at the spectral radius condition .
Medium 2. Implement preconditioned CG using the Jacobi (diagonal) preconditioner: replace with where . Compare to unpreconditioned CG on an ill-conditioned system.
Hard. Implement GMRES (Generalized Minimum Residual) for non-symmetric systems: build an orthonormal Krylov basis using modified Gram-Schmidt, solve a small least-squares problem at each step. Apply to a non-symmetric sparse system of size .
8. Mini Project¶
# --- Mini Project: Solve 2D Heat Equation with CG ---
import time
def laplacian_2d(n):
N2 = n*n
A = np.zeros((N2, N2))
for i in range(n):
for j in range(n):
idx = i*n + j
A[idx, idx] = 4.0
if i > 0: A[idx,(i-1)*n+j] = -1.0
if i < n-1: A[idx,(i+1)*n+j] = -1.0
if j > 0: A[idx,i*n+(j-1)] = -1.0
if j < n-1: A[idx,i*n+(j+1)] = -1.0
return A
n_grid = 15
A_2d = laplacian_2d(n_grid)
b_2d = np.ones(n_grid**2)
t0 = time.perf_counter()
x_dir = np.linalg.solve(A_2d, b_2d)
t_dir = time.perf_counter() - t0
t0 = time.perf_counter()
x_cg, errs2d = conjugate_gradient(A_2d, b_2d)
t_cg2 = time.perf_counter() - t0
print(f'Grid: {n_grid}x{n_grid}={n_grid**2} unknowns')
print(f'Direct: {t_dir*1000:.1f}ms, CG ({len(errs2d)} iters): {t_cg2*1000:.1f}ms')
print(f'Error: {np.linalg.norm(x_cg - x_dir):.2e}')
fig, axes = plt.subplots(1,2,figsize=(10,4))
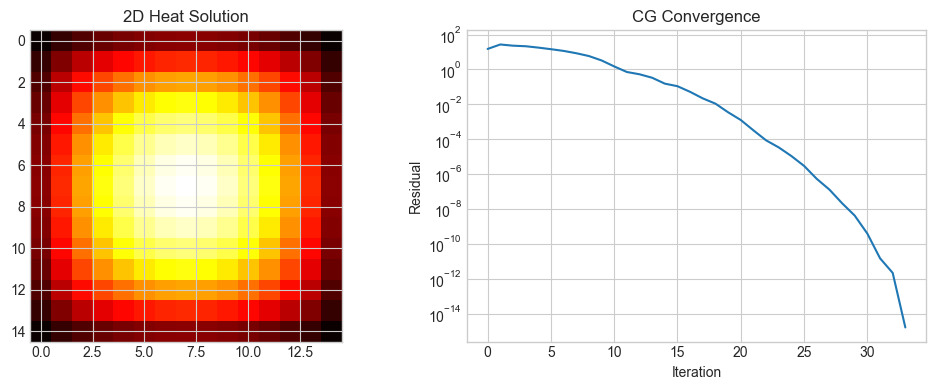
axes[0].imshow(x_dir.reshape(n_grid,n_grid), cmap='hot')
axes[0].set_title('2D Heat Solution')
axes[1].semilogy(errs2d)
axes[1].set_xlabel('Iteration')
axes[1].set_ylabel('Residual')
axes[1].set_title('CG Convergence')
plt.tight_layout()
plt.show()Grid: 15x15=225 unknowns
Direct: 64.8ms, CG (34 iters): 3.2ms
Error: 7.41e-14
9. Chapter Summary & Connections¶
Iterative methods solve via repeated matrix-vector products at per step — scalable to millions of unknowns (ch195).
Jacobi and Gauss-Seidel converge when is diagonally dominant; CG is optimal for SPD systems and converges in iterations.
The condition number (ch194) governs convergence rate; preconditioning reduces effective .
CG is the algorithmic complement to gradient descent for quadratic objectives: they are the same algorithm on the quadratic loss .
Forward: CG’s connection to gradient descent on quadratics is made explicit in ch212 (Gradient Descent), where the convergence rate appears again. Preconditioning connects to ch273 (Regression) and the normal equations.
Backward: Iterative methods complement ch161 (Gaussian Elimination) and ch163 (LU Decomposition). The Krylov subspace framework connects back to ch171 (Eigenvalue Computation) via the power method.